рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Вторичные радиолокаторы управления воздушным движением
Реферат Курсовая Конспект
Вторичные радиолокаторы управления воздушным движением
Вторичные радиолокаторы управления воздушным движением - раздел Механика, Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км Система Вторичной Радиолокации Служит Для Определения Координ...
Система вторичной радиолокации служит для определения координат самолетов, получения, декодирования, обработки и преобразования дополнительной информации о ВС, оборудованных бортовыми ответчиками, соответствующими нормам ИКАО и России.
В основе всех систем ВРЛ лежит канал связи между наземной аппаратурой (запросчиком) и бортовой аппаратурой (ответчиком) (рис. 3.1).
 | |||
 | |||
Линия передачи
данных Ответчик
Запросчик
Рис. 3.1. Состав системы ВРЛ:
И – индикатор; ДШ – дешифратор; Ш – шифратор; АД и О – аппаратура декодирования и обработки
На вход ответчика поступают коды запроса. Вид запросной информации закодирован во временных интервалах между импульсами запросных посылок. Передача запросных посылок осуществляется с помощью направленной антенны, вращающейся в горизонтальной плоскости. Таким образом, ВС, находящиеся в зоне действия системы под разными азимутами, облучаются последовательно в разные моменты времени. В течение времени пока самолет находится в пределах ширины главного лепестка ДНА, на вход бортового ответчика поступает несколько десятков запросных сигналов.
Запросный код формируется в шифраторе (УВД/RBS), здесь же формируется импульс подавления и вся эта зондирующая комбинация модулирует передатчик и поступает в двухдиапазонную антенну. Антенна обеспечивает формирование ДН по запросу основного канала и ДН антенны подавления. Ответная информация принимается антенной и поступает на соответствующие входы приемных устройств двух диапазонов, в которых осуществляется прием, усиление, детектирование и подавление сигналов боковых лепестков по каналу ответа. Для этого каждое приемное устройство выполнено двухканальным с суммарно-разностными входами.
Аппаратура декодирования и обработки осуществляет декодирование координатных сигналов и их последующую очистку от несинхронных помех, декодирование информации и аварийных сигналов, преобразование информации о высоте полета в футах в информацию, выраженную в метрах двоично-десятичным кодом.
Система кодирования запросных и ответных сигналов, используемая в России (УВД), отличается от системы, применяемой в соответствии с нормами и рекомендациями ИКАО (RBS).
Расстановка кодовых импульсов запроса для режимов УВД и RBS приведена в табл. 3.1.
Таблица 3.1
Расстановка кодовых импульсов запроса для режимов УВД и RBS
 Информационные сигналы УВД состоят из трех ключевых и сорока информационных импульсов.
Информационные сигналы УВД состоят из трех ключевых и сорока информационных импульсов.
Информационный код 1 содержит информационное слово №1 и обеспечивает передачу бортового номера из пяти цифр. Информационный код 2 содержит информационное слово №2 и обеспечивает передачу информации о высоте, запасе топлива и сигнала « Бедствие». Данные о запасе топлива в процентах от полной вместимости топливных баков передают с использованием разрядов 17 и 20 информационного кода. Информационный код 3 должен содержать информационное слово №3 и обеспечивать передачу значений путевого угла в пределах от 0 до 180°, значений путевой скорости в интервале от 0 до 3034, 3168 км/ч.
В режиме RBS сигналы ответа содержат координатные и информационные импульсы. В ответ на запрос кодом А передается код опознавания ВС, обозначение которого состоит из четырех цифр от 0 до 7 включительно. Кодирование каждой цифры кода опознавания производится тремя разрядами информационного кода.
Тактико-технические характеристики самолетных ответчиков приведены в табл. 3.2.
Таблица 3.2
Тактико-технические характеристики самолетных ответчиков
| Показатель | СОМ-64 | СОМ-72М | SSR-2700 (Великобри- тания) | TRA-63A (США) |
| Число частот запроса Число частот ответа Количество используемых ответных кодов Бортовой номер (режим УВД) Бортовой номер (режим RBS) Высота полета (режим УВД), м Высота полета (режим RBS), ф Запас топлива, градации Вектор скорости, курс, бит Команды БСПС, число Допустимая погрешность измерения дальности, м | 500-300000 300-100000 - - 300±2 | 500-300000 300-100000 75±1 | - - 300-100000 - ±1 | - - 300-100000 - ±1 |
Значение каждой цифры определяют суммой обозначений соответствующих разрядов информационного кода, имеющих значение «1». В ответ на запрос кодом С передается информационный код высоты, обеспечивающий передачу значений барометрической высоты полета.
Кроме УВД и RBS существует режим УВД-М, когда ответные сигналы кодируются соответственно режиму УВД, но передаются на международной несущей частоте 1090  3 МГц.
3 МГц.
Отечественные ответчики имеют два канала: для работы по нормам ИКАО и стандарту России.
Современные индикаторы воздушной обстановки позволяют отобразить формуляр с дополнительной информацией рядом с отметкой от цели. В режиме запроса 3К1 бортовые ответчики передают пятизначный бортовой номер. На запрос 3К2 передаются сообщения об относительной или абсолютной высоте (1500 градаций) и данные о запасе топлива (15 градаций).
Для сигнала «Бедствие» отведен 16 разряд. Последняя пятая декада несет информацию об остатке топлива в процентах (15 градаций по 5%). В ответ на запрос 3К3 передается информация о скорости ВС.
3.1. Состав ВРЛ
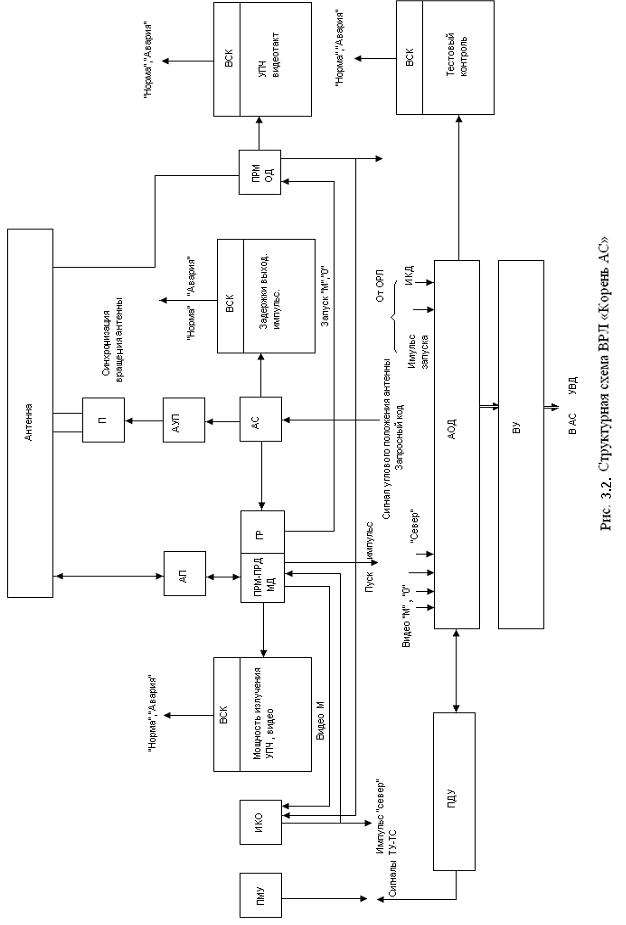
 В любом ВРЛ выделяют радиолокационное оборудование, размеща-емое на позиции, и аппаратуру декодирования и обработки информации, устанавливаемую на КДП. Оборудование ВРЛ состоит из: антенны (для автономного ВРЛ); антенно-фидерного тракта; приемопередатчика (для каждого диапазона частот); аппаратуры управления; аппара-туры синхронизации; контрольного индикатора; источника питания. Структурная схема ВРЛ «Корень АС» показана на рис. 3.2. На этой схеме показан один комплект оборудования без резервных узлов. В состав ВРЛ входят: двухдиапазонная антенна А с колонкой привода П и аппаратурой управления приводом АУП, приемопередатчик международного диапазона ПРМ-ПРД-МД, приемник отечественного диапазона ПРМ ОД, контрольный индикатор кругового обзора ИКО.
В любом ВРЛ выделяют радиолокационное оборудование, размеща-емое на позиции, и аппаратуру декодирования и обработки информации, устанавливаемую на КДП. Оборудование ВРЛ состоит из: антенны (для автономного ВРЛ); антенно-фидерного тракта; приемопередатчика (для каждого диапазона частот); аппаратуры управления; аппара-туры синхронизации; контрольного индикатора; источника питания. Структурная схема ВРЛ «Корень АС» показана на рис. 3.2. На этой схеме показан один комплект оборудования без резервных узлов. В состав ВРЛ входят: двухдиапазонная антенна А с колонкой привода П и аппаратурой управления приводом АУП, приемопередатчик международного диапазона ПРМ-ПРД-МД, приемник отечественного диапазона ПРМ ОД, контрольный индикатор кругового обзора ИКО.
В состав КДП входят: аппаратура обработки и декодирования ответных сигналов АОД, выходное устройство ВУ. Пульты местного ПМУ и дистанционного ПДУ управления обеспечивают возможность задания различных режимов работы ВРЛ. Система встроенного контроля ВСК обеспечивает контроль основных параметров ВРЛ с выдачей сигналов «Норма» и «Авария».
Аппаратура синхронизации АС обеспечивает синхронную работу ВРЛ с первичным радиолокатором.
Для этого на ВРЛ «Корень-АС» с первичного радиолокатора поступает импульс запуска и напряжение синхронного вращения антенн. Управление работой передающего устройства и синхронизацию работы всего ВРЛ осуществляет генератор режимов ГР.
Генератор режимов формирует импульсы запуска, сигналы переключения запросных кодов шифраторов передающего устройства, импульс модуляции гетеродина возбудителя, а также определяет последовательность чередования импульсов запроса.
Запросные импульсы и импульсы подавления от передатчика через антенные переключатели (АП) и фидерный тракт подводятся к антенне.
Прием ответных посылок производится на частотах международного и отечественного диапазонов. В приемных устройствах подавляются сигналы боковых лепестков по линии ответа. Ответные сигналы усиливаются и детектируются. Затем вся информация транслируется по кабелю на КДП.
Импульс «Бланк дальности» вырабатывается в приемном устройстве и открывает его на время, пропорциональное дальности первичной РЛС. Напряжение ВАРУ уменьшает усиление приемника для переотраженных сигналов и сигналов близкорасположенных целей. Тем самым уменьшается перегрузка приемника. На время действия напряжения ВАРУ строб ВАРУ отключает схему ШАРУ, которая обеспечивает регулировку усиления каскадов приемного устройства по уровню шумов.
Вся ответная информация и запросные коды поступают на аппаратуру групповой обработки, где осуществляется корректировка входных сигналов, декодирование координатных сигналов и их очистка от несинхронных помех, декодирование информации, а также преобразование информации о высоте полета, выраженной в футах и передаваемой кодом Гиллхэма в информацию, выраженную в метрах двоично-десятичным кодом. Далее, в зависимости от структуры построения системы управления воздушным движением, информация в параллельном виде поступает в АС УВД или на индивидуальную аппаратуру диспетчера. При использовании в АС УВД ВРЛ должен сопрягать с АПОИ.
В состав ВРЛ входят контрольный индикатор кругового обзора и оборудование местного и дистанционного управления.
3.2. Антенно-фидерная система ВРЛ
Специфической функцией антенн ВРЛ является обеспечение подавления сигналов от боковых лепестков ДНА как в режиме запроса, так и в режиме ответа. В автономных вторичных локаторах могут применяться линейные и плоские антенные решетки. Антенные решетки позволяют сформировать узкие диаграммы направленности, а также обеспечить управление ими в зависимости от условий возбуждения излучающих элементов. Примером расположения облучателей служит двухдиапазонная, эквидистантная антенна автономного вторичного радиолокатора типа «Корень». Ее габаритные размеры в горизонтальной плоскости 10 м, в вертикальной 0,5 м. Коэффициент усиления такой антенны в МД К = 20 дБ. Антенна состоит из 42 идентичных двухдиапазонных рупорных излучателей. В каждом рупоре установлены два взаимно перпендикулярных возбудителя, что обеспечивает ортогональную поляризацию сигналов. Поляризация излучаемых и принимаемых сигналов вертикальная для международного диапазона частот и горизонтальная для отечественного диапазона частот.
В горизонтальной плоскости ширина диаграммы направленности основного луча на уровне 3 дБ составляет (3,0+0,3)° на частотах отечественного диапазона и (2,0 ± 0,2)° на частотах международного диапазона. В вертикальной плоскости ДНА антенны имеет ширину (50+5)° на уровне 3 дБ.
Одним из вариантов антенной системы ВРЛ может служить плоская двухдиапазонная антенная решетка. Использование антенн в виде плоских антенных решеток позволяет увеличить крутизну переднего фронта диаграммы направленности, увеличить коэффициент усиления антенны. Расстояние между излучателями выбирается из условия получения малого уровня боковых лепестков и отсутствия дифракционных максимумов основного лепестка.
При соответствующем питании излучателей можно сформировать три ДН: суммарную, разностную и ДН подавления. Эти ДН необходимы для обеспечения моноимпульсного метода локации. Используемая в настоящее время антенна ВРЛ «Корень-АС» на МД имеет крутизну переднего фронта ДН К~ 0,6 дБ/градус на уровне 0,5Еmax. Плоская антенная решетка может обеспечить К более 2 дБ/градус.
Фидерная система содержит четыре тракта: приемопередающий тракт запроса и ответа МД; приемопередающий тракт подавления по запросу и ответу МД; приемный тракт ответа ОД; приемный тракт подавления по ответу ОД.
3.3. Передающее устройство ВРЛ
Оно служит для формирования импульсных кодированных посылок запроса; а также импульсов подавления при наличии канала подавления по запросу.
Рассмотрим работу передающего устройства ВРЛ на примере передатчика ВРЛ «Корень – АС». Этот передатчик строится по двухканальной схеме рис. 3.3: один канал для передачи сигнала запроса, другой для передачи сигнала подавления.

Рис. 3.3. Структурная схема передатчика ВРЛ
Если для генерации сигнала запроса и подавления применяется один и тот же передатчик, а сигналы подавления излучается отдельной антенной, то для их коммутации необходимо использовать устройство быстрого высокочастотного переключения. Когда ВРЛ работает в соответствии с отечественным и международным стандартом, в ПРД предусматривается два режима запроса - УВД и RBS. Классическая схема передатчиков ВРЛ представляет собой одно – или двухканальное устройство, работающее в режиме RBS и в совмещенном режиме RBS – УВД. В состав ПРД входят шифраторы режимов RBS и УВД (Ш – RBS, Ш – УВД), модуляторы М, генераторы ГРЧ и усилители УРЧ. Все узлы ПРД имеют резерв.
На вход шифраторов УВД и RBS с генератора режимов поступают импульсы запуска и импульсы режимов, обеспечивающие включение соответствующего кода.
Шифратор RBS предназначен для формирования импульсов международных запросных кодов по задержкам, по длительности и амплитуде. Синхронно с импульсом внешнего запуска в шифраторе вырабатывается сетка времени, к которой производится привязка импульсов кода. Импульсы временной сетки следуют с периодом 1мкс и имеют длительность τи ≤ 0,3 мкс. Импульс Р1 и импульс Р3, формируемый с помощью линии задержки, после привязки их к сетке времени подаются на каскады, обеспечивающие их рабочую длительность и амплитуду. На выходе шифратора вырабатываются импульсы кода и импульс подавления, который может быть отключен по специальному сигналу.
3.4 . Аппаратура декодирования и обработки информации ВРЛ
Входная информация, включающая в себя запросные коды и ответные видеосигналы режимов УВД и RBS, с выходов соответствующих корректирующих видеоусилителей (рис. 3.4) поступает на входы трех дешифраторов. В плате сопряжения осуществляется нормирование служебных сигналов ВРЛ и распределение их на устройства аппаратуры. Для обработки информации от ВС, находящихся на незначительном удалении друг от друга, дешифраторы выполнены как двухканальные, что позволяет производить декодирование сигналов при наложении ответных кодов.
 |
Рис. 3.4. Структурная схема аппаратуры декодирования и обработки:
ДР – дешифратор режимов; ПС – плата сопряжения; ДКК – дешифратор координатных кодов; ДИ – дешифратор информации; Пф®м – преобразователь футы – метры; ФНС – фильтр несинхронных помех; ВУ – выходное устройство
Декодированная координатная информация очищается в фильтре от несинхронных помех, а информационная посылка ИКАО о высоте полета, передаваемая в футах, преобразуется в метры и поступает так же, как и информационная посылка УВД, на выходные устройства.
3.5. Дешифраторы каналов УВД и RBS
Дешифратор декодирует одиночные и переплетенные ответные коды, образованные в результате наложения двух ответных сигналов близко летящих ВС, исправляет в ответной посылке одиночные и обнаруживает двойные ошибки. Одиночной ошибкой считается стирание или возникновение одного из символов в разряде информационного слова. Двойной ошибкой считаются следующие искажения: стирание одного и возникновение другого символа в разряде, образование двух ошибочных символов, стирание двух символов.
Дешифратор УВД состоит из трех дешифраторов кодов, дешифратора информации, кварцевого калибратора и устройства контроля.
Дешифратор международного канала служит для декодирования координатных и аварийных кодов, декодирования информационного слова и импульса опознавания SPI. Дешифратор международного канала состоит из следующих основных узлов: дешифратора режимов, устройства задержки, дешифратора координатных отметок, дешифратора информации.
При приеме ответных сигналов возможны следующие случаи:
1. Одиночный ответ.
2. Переплетенный ответ. В этом случае дешифратор декодирует две координатных пары и информацию первого и второго ответов. Пересеченные ответы, при которых интервал между кодовыми импульсами кратен 1,45 мкс. В этом случае возможно образование ложных координатных отметок, а также искажение информации.
Дешифратор при обнаружении ситуации пересечения ответных кодов выдает только координатные отметки.
3 Сближенные ответные коды, когда интервал между двумя ответами больше времени работы первого отклика. В этом случае дешифратор обрабатывает оба ответа, как одиночные.
3.6. Приемное устройство ВРЛ
Приемное устройство ВРЛ предназначено для выделения сигнала, принимаемого антенной на фоне шумов, его усиления и детектирования. Кроме того, в приемном устройстве осуществляется подавление сигналов, принятых по боковым лепесткам ДНА (подавление по ответу). В ВРЛ широко используется метод подавления с амплитудно-фазовым преобразованием входных сигналов. Поэтому приемные устройства ВРЛ (рис. 3.5) строятся по двухканальной схеме и содержат два канала прохождения сигнала - суммарный и разностный.
Каждый канал представляет собой схему супергетеродинного приемника с одним преобразованием частоты с помощью единого гетеродина. В состав ВРЛ, как правило, входят приемники отечественного и международного диапазонов, что обусловливается различием частотных диапазонов принимаемых сигналов. В приемных устройствах ВРЛ находят применение специальные схемы автоматической регулировки усиления ШАРУ и ВАРУ. Основные узлы ПРМ охвачены встроенной системой допускового контроля.
Кольцевой мост на входе приемного устройства выполняет функции сложения и вычитания сигналов, принятых основной антенной и антенной подавления. Образовавшийся в результате этого суммарный и разностный сигналы имеют определенную фазовую окраску (различный сдвиг фаз относительно друг друга) в зависимости от направления приема. Усилители радиочастоты, используемые в ПРМ ВРЛ, представляют собой широкополосные устройства, выполненные на малошумящих элементах.
Рис. 3.5. Структурная схема приемного устройства ВРЛ
С выходов УРЧ сигналы поступают на балансные смесители (БС). Фильтр-делитель мощности (ФДМ) выполняет функции делителя мощности сигнала гетеродина и фильтра, обеспечивающего развязку между каналами “Сумма” и “Разность”. Суммарный и разностные сигналы промежуточной частоты (60 МГц) подаются на входы двухканального усилителя промежуточной частоты и далее на фазовый детектор (ФД) для осуществления фазоамплитудного преобразования этих сигналов. На выходах ФД соотношение амплитуд сигналов Uосн и Uпод повторяет соотношение амплитуд сигналов на входе ПРМ. После преобразования частоты основные узлы приемного устройства отечественного и международного диапазонов выполняются идентичными.
Плата АРУ объединяет схему ШАРУ и схему ВАРУ. Схема ШАРУ обеспечивает постоянство коэффициентов усиления каналов “Сумма” и “Разность” приемного устройства. Регулировка проводится по собственным шумам приемного устройства на выходе УПЧ в момент отсутствия ответных сигналов (диапазон нерабочей дальности). На вход схемы ШАРУ поступают постоянные напряжения, пропорциональные уровню шумов на выходе каналов “Сумма” и “Разность”. Постоянная составляющая шумов выделяется с помощью минимального пик-детектора (МПД), выходное напряжение которого, поступающее через плату АРУ на УПЧ соответствующего канала, регулирует коэффициент усиления суммарного и разностного канала. На время приема ответного сигнала схема ШАРУ отключается и включается схема ВАРУ, которая предназначена для выработки регулирующего напряжения, изменяющего во времени коэффициент усиления приемного устройства по заданному закону. Схема ВАРУ обеспечивает независимость амплитуды выходных сигналов приемного устройства от дальности.
Схема контроля (СК) осуществляет контроль коэффициентов усиления каналов “Сумма” и “Разность” как по абсолютной величине, так и относительно друг друга, а также контролирует исправность схемы амплитудного сравнения и видеоусилителя.
В приемном устройстве ВРЛ может возникать целый ряд помех. Наиболее существенные из них следующие:
1. Внутрисистемные помехи в том числе:
а) синхронные помехи, образующиеся при запросе данным запросчиком нескольких ответчиков одновременно и при одновременном приеме ответов нескольких ответчиков на запрос данного запросчика как по основному, так и по боковым лепесткам ДНА;
б) несинхронные помехи, влияние которых проявляется при наличии нескольких запросчиков в одной зоне. Если ВС находится в области, перекрываемой несколькими наземными запросчиками, то ответы любому из них, попадая по боковым лепесткам на вход других ВРЛ, могут привести к возникновению ошибок определения азимута.
Уровень внутрисистемных помех растет с ростом интенсивности воздушного движения.
2. Многолучевое распространение сигнала ВРЛ по каналу “Земля-борт-земля”, связанное с переотражением от земли или от различных отражающих объектов.
В современных ответчиках, работающих по стандарту России для борьбы с внутрисистемными помехами, применяются схемы разрядки потока ответных сигналов, фильтры-аттенюаторы, уменьшающие чувствительность приемника, схемы блокирования приемника после приема запросного сигнала. В наземной аппаратуре ВРЛ используют двухканальные устройства декодирования ответных сигналов, устройства защиты от несинхронных помех, обеспечивают разнос частот повторения запросных сигналов близко расположенных запросчиков. Существенным источником внутрисистемных помех являются боковые лепестки ДНА запросчика.
Современные ВРЛ системы обеспечивают подавление сигнала боковых лепестков как по каналу запроса “земля-борт”, так и по каналу ответа “борт-земля”. В первом случае предотвращаются запуски ответчика боковыми лепестками ДНА, во втором – предохраняется тракт обработки ответных сигналов наземной аппаратуры от несинхронных помех.
Принцип подавления ответных сигналов, принятых боковыми лепестками ДНА ВРЛ, основан на сравнении амплитуд сигналов, поступающих по двум независимым, идентичным каналам приемника от основной антенны и антенны подавления. В случае, если Uосн < Uпод, что соответствует приходу ответной посылки по боковому лепестку основной антенны, ключевая схема запрета запирает выход приемника, реализуя режим подавления. Если Uосн > Uпод, ответная посылка, принятая главным лепестком, после усиления проходит в аппаратуру обработки. Для улучшения условий прохождения сигналов в обоих трактах приемника в современных ВРЛ амплитудные соотношения на входе преобразуются в фазовые (рис. 3.5). На выходе приемника соотношения фаз сигналов Uосн и Uпод с помощью фазового детектора вновь преобразуются в амплитудное.
Сигналы, принятые основной антенной и антенной подавления, одновременно складываются и вычитаются. Образующиеся при этом суммарный Uc и разностный Uр сигналы получают друг относительно друга определенную фазовую окраску, которая в зависимости от направления приема будет иметь одно из двух возможных значений:
- при приеме сигналов в направлении главного лепестка основной антенны угол между векторами суммарного и разностного сигналов будет острым;
- при приеме сигналов в направлении боковых лепестков угол между векторами суммарного и разностного сигналов будет тупым.
Суммарные и разностные сигналы, получившие фазовую окраску в зависимости от направления приема, усиливаются в независимых каналах УПЧ до необходимой величины.
Далее суммарные сигналы промежуточной частоты используются в качестве опорных и подаются в альтернативный канал как опорные.
Для частичной борьбы с синхронными помехами, поступающими на ВРЛ по основному лепестку ДНА, дешифраторы информационных кодов, как правило, выполняются в двухканальном варианте и обеспечивают обработку информации от двух ответчиков одновременно.
Несинхронная помеха подавляется в наземной аппаратуре ВРЛ фильтром несинхронных помех. Работа фильтра основана на случайном характере повторения импульсов помехи. Все сигналы, частота которых отличается от частоты повторения запросных импульсов ВРЛ, отфильтровываются.
Кроме того, в ВРЛ применяется метод адаптивной импульсной ВАРУ, заключающейся в том, что управляющее напряжение ВАРУ запирает тракт лишь в моменты, соответствующие дальностям на которых расположены самолеты, подверженные воздействию переизлученных сигналов.
Значительный эффект в борьбе с факторами, ухудшающими показатели работы существующих ВРЛ, дает введение моноимпульсного метода определения направления, а так же использование индивидуально-адресной системы запроса.
3.7. Перспективные системы вторичной радиолокации
Главными направлениями проводимых работ по улучшению технических характеристик ВРЛ, повышению эксплуатационной надёжности являются: повышение вероятности получения информации, что связано с уменьшением синхронных и несинхронных помех, расширение объёма информации, улучшение зоны видимости ВРЛ. Решение этих задач может быть осуществлено повышением эффективности подавления боковых лепестков, оптимизацией системы кодирования запросных посылок, использованием плоской антенной решётки, изменением логики очистки от помех, введением вобуляции частоты следования и другими техническими мероприятиями.
Можно выделить два основных направления совершенствования радиолокаторов с активным ответом. Первое – модернизация существующих ВРЛ, улучшение их тактико-технических и эксплуатационных характеристик. Второе направление – создание принципиально новой ВРЛ, а именно ВРЛ с дискретно-адресным запросом и моноимпульсным методом определения угловых координат.
Использование моноимпульсного метода измерения азимута позволяет значительно уменьшить частоту повторения запросных импульсов, чем улучшается работа ВРЛ, уменьшаются помехи.
Моноимпульсная наземная станция имеет более высокие точностные характеристики, и поэтому может обеспечить меньшие минимумы эшелонирования на большем расстоянии. Так, если значения среднеквадратического отклонения определения координат лучших современных зарубежных обычных ВРЛ по дальности составляет σД=250 м, по азимуту σа=0,150, то для моноимпульсной станции (МВРЛ) σД=100 м и σа=0,0060.
3.7.1. Моноимпульсные ВРЛ

Моноимпульсный метод радиолокации существенно повышает точность измерения и вероятность достоверной информации. Его суть заключается в извлечении полной информации об угловом положении цели по каждому ответному импульсу.
В этом случае осуществляется одноимпульсная пеленгация ВС в отличие от традиционных методов, когда для определения азимута цели обрабатывается пачка импульсов, принятых главным лепестком ДН антенны. В МВРЛ ответные сигналы от цели принимаются одновременно двумя независимыми приёмными каналами (в азимутальной плоскости), формируются два независимых сигнала и на их основе осуществляется расчёт азимутального угла цели или угла отклонения (Δβ) от равносигнального направления ДН антенны. Наибольшее распространение получили системы, измеряющие угол Δβ на основе обработки суммарного  и разностного
и разностного  сигналов. Формирование сигналов происходит с помощью суммарной Σ и разностной Δ ДНА. Последующее усиление и преобразование сигналов осуществляется в соответствующих независимых каналах.
сигналов. Формирование сигналов происходит с помощью суммарной Σ и разностной Δ ДНА. Последующее усиление и преобразование сигналов осуществляется в соответствующих независимых каналах.
 Напомним, что указанные ДНА образуются, если осуществить операцию суммирования =
Напомним, что указанные ДНА образуются, если осуществить операцию суммирования = и вычитания =
и вычитания = сигналов в двух разнесённых на расстояние d антенн. Разность фаз Δφ между сигналами
сигналов в двух разнесённых на расстояние d антенн. Разность фаз Δφ между сигналами  и
и  связана с углом отклонения от равносигнального направления Δβ выражением:
связана с углом отклонения от равносигнального направления Δβ выражением:
, (3.1)
а с отношением комплексных огибающих разностного и суммарного сигналов выражением:
 . (3.2)
. (3.2)
С учётом (3.1) и (3.2) можно записать алгоритм оценки угла Δβ:
 .
.
Таким образом, учитывая, что информационным параметром при измерении угла является разность фаз Δφ, а угловой дискриминатор работает с сигналами D и S, МВРЛ можно отнести к фазовой, суммарно-разностной системе.
Особенностью отечественного МВРЛ является совмещение двух стандартов работы. В связи с этим в структурную схему одного комплекта МВРЛ входят: двухдиапазонная моноимпульсная антенная система в виде антенной решётки; приёмные устройства диапазонов 740 и 1090 МГц (блоки СВЧ); процессор ответов УВД; процессор ответов RBS; процессор обработки и выдачи информации (аппаратура обработки информации (АОИ)); передатчик; система контроля и управления. Характер диаграмм направленностей антенны так же, как и алгоритм обработки сигналов, определяется фазовым методом пеленгования сигнала. На рис. 3.6 показана упрощенная структурная схема моноимпульсной вторичной системы, где разделение сигналов суммарного и разностного канала осуществляется в антенно-фидерной системе.

Рис. 3.6. Структурная схема МВРЛ:
А – антенна; ВП – вращающийся переход; К – коммутатор; БСВЧ – блок СВЧ; АО и И – аппаратура обработки и информации; УК и О – устройство контроля и отображения; СК и У – система контроля и управления
Требования к ДНА в вертикальной плоскости могут обеспечить восемь излучателей в столбце, расположенных с шагом Δl=230 мм.
Антенна МВРЛ предназначена для формирования в двух частотных диапазонах диаграмм направленности трёх типов – суммарной Σ, разностной Δ, подавления Ω. К основным характеристикам антенны запросчика можно отнести: ширину суммарной диаграммы направленности в азимутальной плоскости ΔβΣ; коэффициент усиления GΣ; уровень нуля и провала разностной ДНА и ДНА подавления; смещения нуля и провала ДНА Δ и Ω; крутизну нижней кромки главного лепестка ДН в вертикальной плоскости; уровень боковых лепестков ДНА. Заданным техническим требованиям может удовлетворять плоская антенная решётка с широким использованием крупногабаритных полосковых диаграммообразующих схем.
Для формирования суммарной ДНА с шириной в горизонтальной плоскости на уровне -3 дБ ΔβΣ=2,5…3,50 с коэффициентом усиления 27 дБ горизонтальный раскрыв решётки должен содержать от 33 до 37 столбцов излучателей одного диапазона с интервалом между столбцами Δl=250 мм.
Приёмное устройство МВРЛ
Оно служит для усиления и преобразования высокочастотных сигналов, принятой суммарной Σ и разностной Δ диаграммам направленности антенн, а также по ДНА подавления Ω.
Для осуществления селекции сигнала полоса пропускания приёмника выбирается равной Δf=(10±1) МГц. Чувствительность должна быть не хуже чем -117 дБ/Вт (для аэродромного) и -120 дБ/Вт (для трассового) радиолокатора. На выходе приёмных устройств должны формироваться видеосигналы: сумма Σ, разность Δ, подавления и др., выполняющие вспомогательные функции (обнаружения, усиления частотной селекции).
Приёмное устройство (рис. 3.7) в целом можно представить совокупностью ВЧ и НЧ блоков.
Блок антенных усилителей (БАУ) располагается на антенной платформе. В нём происходит линейное усиление сигналов по трём каналам Σ, Δ, Ω.
В блоке высокой частоты (БВЧ) сигналы усиливаются, фильтруются, преобразуются в сигналы промежуточной частоты и передаются на два многофункциональных усилителя (УМФ). В УМФ измерительный поступают сигналы Σ и Δ, а в УМФ подавления – Σ и Ω. Многофункциональные усилители измерения и подавления выполнены идентично и представляют собой аналоговые процессоры. Характеристики приёмного устройства в значительной степени влияют на точностные характеристики МВРЛ.
 Рис. 3.7. Структурная схема приемника МВРЛ
Рис. 3.7. Структурная схема приемника МВРЛ
В первую очередь это относится к стабильности коэффициентов передачи линейных частей ПРМ и оснований логарифмов логарифмических усилителей.
Поскольку информационным параметром сигнала является фаза, то кроме амплитудной стабильности важно обеспечить фазовую идентичность и стабильность каналов ПРМ. Питание схем приемника осуществляется от вторичных источников питания (ВИП).
Аппаратура обработки информации.
Аппаратура обеспечивает полный цикл моноимпульсной, первичной и вторичной обработки радиолокационной информации. Для существенного повышения достоверности полученной информации АОИ обеспечивает оперативное управление параметрами приёмных и передающих устройств, оптимизацию приёма полезных сигналов на фоне шумов и шумоподобных помех и подавления ложных сигналов.
Функциональная схема аппаратуры обработки информации показана на рис. 3.8, а фрагмент схемы процессора обработки одиночного импульса показан на рис. 3.9.

Рис. 3.8. Функциональная схема аппаратуры обработки информации
Рис.3.9. Структурная схема устройства обработки одиночного импульса
С выхода приёмного устройства (рис. 3.9) продетектированные ответные сигналы поступают на процессор моноимпульсной обработки одиночных импульсов (ПООИ) УВД и RBS. Здесь с помощью информационных сигналов Σ
и Δ вычисляются знак и угол отклонения цели от равносигнального направления.
Далее измеренные значения углов в цифровом виде обрабатываются в процессорах ответов (ПО) УВД и RBS.
Процессоры ответов обнаруживают ответы при получении импульсов координатного кода, декодируют служебные и информационные импульсы, усредняют амплитуду и Δβ по всем принятым ответам и пересылают их в буфер данных (БД). Благодаря двухканальной схеме построения процессоры ответов, декодируя координатные и ключевые УВД импульсы, разделяют два наложенных ответа. Основное назначение БД состоит в селекции синхронных ответов по назначенному критерию (то есть очистка от несинхронных помех) и последующей передаче информационных сообщений через микро ЭВМ и адаптер внешних устройств (АВУ) в линию передачи данных (ЛПД) АС УВД. Две микро ЭВМ, объединённые в единый вычислительный комплекс, осуществляют первичную и вторичную обработку принимаемых пакетов ВС.
Первичная (внутрипакетная) обработка включает измерения азимута, дальности, бортового номера, высоты и т.д.
Вторичная обработка (по сопровождению цели) обеспечивается фильтром межобзорной корреляции, позволяющей увязать треки, т.е. осуществить сопровождение всех ВС в зоне МВРЛ и подавить ложные ответы, возникающие вследствие переотражений сигналов запроса и ответа от местных предметов. Адаптер управления МВРЛ формирует сигналы запроса и подавления для передатчика, сигналы регулировки и синхронизации работы аппаратуры.
Передающее устройство моноимпульсного ВРЛ предназначено для формирования высокочастотных кодированных импульсных сигналов запроса и подавления в различных режимах. Передающее устройство с учётом перспектив использования должно быть рассчитано на передачу ВЧ энергии средней мощности Pср=200 Вт при импульсной Pи=4000 Вт.
Система ВРЛ с дискретно-адресным запросом
В 1987 г. ИКАО приняло поправку 67, в которой определены требования стандарта ИКАО на S-адресный режим работы системы ВРЛ, т.е. режим с дискретно-адресным запросом.
Реализация режима S требует обеспечить слежение за местоположением летательных аппаратов с адресными ответчиками и моноимпульсное измерение их азимутов.
Принципиальным отличием дискретно-адресной системы вторичной радиолокации (ДАС ВРЛ) с индивидуальным адресным запросом является возможность запрашивать не все ВС, находящиеся в зоне действия ВРЛ, а индивидуально, используя специальный адресный запрос. Помимо существенного снижения уровня внутрисистемных помех, ДАС ВРЛ обеспечивает возможность автоматизированного обмена командами и текущей информацией между АС УВД и ВС за счёт использования канала передачи цифровой информации «Земля-борт-земля». Использование дискретного адреса при наблюдении позволяет избежать одновременного запроса всех целей, находящихся в пределах луча ДНА, а распределение запросов по времени приводит к исключению случаев наложения ответных сигналов близко расположенных самолётов.
Для дискретного запроса самолётов, оборудованных адресными ответчиками, запросчик ведёт список данных идентификации и координат, наблюдаемых в своей зоне действия ВС. Для того, чтобы самолёт мог быть дискретно запрошен, он должен сопровождаться запросчиком. Для обнаружения целей, ещё не взятых на сопровождение, каждый запросчик посылает сигналы общего вызова, на которые самолёты, оборудованные адресными ответчиками, отвечают индивидуальным адресом. Если ответ на запрос не принят, запросчик имеет возможность перезапросить самолёт, пока он находится в луче диаграммы направленности. Задачи, решаемые ДАС ВРЛ, привели к использованию новых для вторичной радиолокации форм сигналов и методов модуляции.
Использование моноимпульсного приёма позволяет снизить скорость опроса, что в сочетании с улучшенной обработкой ответных сигналов в режиме RBS/УВД существенно уменьшает их искажение. ДАС ВРЛ обеспечивает передачу данных в направлении «Земля-борт» и «борт-Земля».
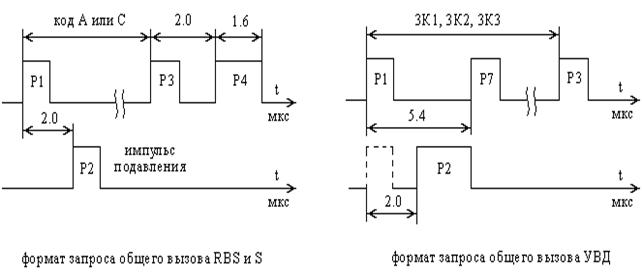
Рис. 3.10. Структура запросных сигналов ДАС ВРЛ
Информационный канал ДАС ВРЛ используется для передачи трёх видов сообщений: данных наблюдений, стандартных сообщений, удлинённых посылок. Данные наблюдений являются частью каждого адресного запроса и ответа и содержат информацию о стандартных режимах и УВД (о высоте, бортовом номере и т.д.). Стандартные сообщения (56 бит) и удлинённые сообщения (80 бит х16) передаются с ведома и по указанию запросчика и являются основными носителями информации. Существуют два типа сигналов, с помощью которых ДАС ВРЛ организует наблюдение за самолётами: запрос общего вызова (рис. 3.10) и адресный запрос (запрос в режиме S –рис. 3.11).
Для обеспечения работы ДАС ВРЛ с ответчиками всех типов используются сигналы общего запроса, которые позволяют обеспечить запрос безадресных ответчиков и первоначальное индивидуальное опознавание адресных ответчиков.
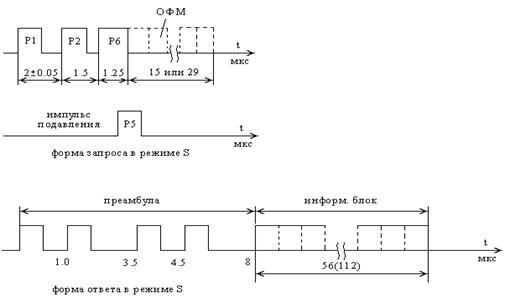
Рис. 3.11. Формат адресного запроса и ответа на адресный запрос
Характерным признаком общего запроса по сравнению с обычным в существующей системе ВРЛ является наличие дополнительного импульса Р4 длительностью 1,6 мкс в режиме общего вызова RBS и S и импульса Р7 в режиме общего вызова УВД и S. При наличии этих импульсов адресные ответчики формируют адресный ответ. При их отсутствии адресный ответчик работает как обычный ответчик.
Запрос и передача информации в канале «земля-борт» осуществляются с помощью кодово-импульсной относительно-фазовой модуляции (ОФМ) несущей. В канале «борт-земля» модуляция кодово-импульсная. Формат адресного запроса (рис. 3.11) состоит из ключа и блока данных, содержащего 56 или 112 разрядов. Ключ содержит два импульса Р1 и Р2 с интервалами в 2 мкс.
Импульсы Р1, Р2 и Р5 аналогичны по форме импульсам, используемым в существующей системе ВРЛ. Импульсы Р1 и Р2 вызывают запирание ответчиков существующей (безадресной) системы ВРЛ на (35±10)мкс, что предупреждает их произвольное срабатывание. Импульс блока данных имеет внутреннюю относительную фазовую модуляцию (ОФМ). Длительность импульса t равна 15 или 29мкс. Модуляция фазы высокочастотной несущей обеспечивает скорость передачи данных 4Мбит/с. Такая скорость позволяет передать 112-битовое сообщение за время, соответствующее блокировке обычных ответчиков. Первое опрокидывание фазы в импульсе Р6 является опорным поворотом синхрофазы. Импульс подавления Р5 боковых лепестков ДАС ВРЛ, который передаётся с помощью антенны, центрируется относительно момента опрокидывания синхрофазы. Появление импульса Р5 при достаточной амплитуде заменяет опрокидывание синхрофазы Р6 в адресном ответчике, в результате чего информация не декодируется.
Сигналы адресного ответа ДАС ВРЛ состоят из четырёхимпульсной преамбулы, сопровождаемой последовательностью импульсов, которые содержат 56 или 112 битов информации. Двоичные данные передаются со скоростью 1Мбит/с, причём интервал 1мкс соответствует каждому биту. Такая скорость передачи данных по каналу «борт-земля» позволяет генерировать ответные импульсы в режимах RBS/УВД и S одним передатчиком. Если значение бита равно единице, то импульс длительностью 0,5 мкс передаётся в первой половине интервала, если нулю, то – во второй.
Четырёхимпульсный ключ позволяет легко различить адресный ответ от ответа режима RBS/УВД и разделить их при взаимном наложении. Выбор кодово-импульсной модуляции для передачи данных по каналу ответа позволяет обеспечить высокую помехоустойчивость к мешающим сигналам RBS/УВД, а также способствует получению постоянного числа импульсов в каждом ответе, гарантирующем достаточную энергию для точного моноимпульсного приёма.
Увеличение точности определения координат, получение дополнительной информации о параметрах движения самолёта, высокая оперативность позволяет в конечном итоге повысить основные показатели эффективности УВД: безопасность, регулярность, экономичность полётов. Широкие перспективы использования ДАС ВРЛ обусловлены высокой надёжностью и большой пропускной способностью цифровой линии передачи данных. Кроме того, режим S используется как основной при построении системы предупреждения столкновений TCAS.
3.7.1. Вторичная РЛС «ЛИРА-ВА»
 РЛС «Лира-ВА» представляет собой вторичный радиолокатор, встраиваемый в радиолокационные комплексы (РЛК) и предназначенный для сбора радиолокационной информации (РЛИ) о воздушной обстановке от бортовых ответчиков воздушных судов (ВС) по стандартам ИКАО и России.
РЛС «Лира-ВА» представляет собой вторичный радиолокатор, встраиваемый в радиолокационные комплексы (РЛК) и предназначенный для сбора радиолокационной информации (РЛИ) о воздушной обстановке от бортовых ответчиков воздушных судов (ВС) по стандартам ИКАО и России.
ВРЛ обеспечивает запрос, получение и передачу информации, выдаваемой бортовыми ответчиками ВС в соответствии с нормами ИКАО и нормами ГОСТ 21800-89 и ГОСТ Р 51845-2001.
Технические характеристики ВРЛ «Лира-ВА»
Зона обзора ВРЛ во всех режимах при нулевых углах закрытия с вероятностью обнаружения Робн = 0,95, вероятностью ложных тревог по собственным шумам приемника Рлт = 10-6 и частоте запросных сигналов не более 300 Гц составляет:
– минимальную дальность обнаружения, км, не более 1,0;
– максимальную дальность обнаружения, км, не менее 450;
– максимальную высоту обнаружения, м, не менее 20000;
– максимальный угол места, град, не менее 45;
– минимальный угол места, град, не более 0,25.
Среднеквадратическая ошибка измерения координат ВС,
без учета ошибок приемоответчика, не более:
– по азимуту (УВД/RBS), град 0,12/0,1;
– по дальности, м 50.
Разрешающая способность не хуже:
- по азимуту, град 3,5;
- по дальности, м 150.
Максимальная импульсная мощность на выходе шкафа ВРЛ не менее 1,8 кВт.
Чувствительность по срабатыванию приемных трактов каналов УВД и RBS по входу приемника ВРЛ не хуже минус 110 дБ/Вт.
Автоматизированная система управления и контроля (АСКУ) обеспечивает:
- перевод аппаратуры в режим местного управления;
- автоматическую и ручную реконфигурацию комплектов аппаратуры;
- установку различных режимов чередования запросных кодов, параметров сигнала внутреннего запуска (частота, вобуляция), уровня выходной мощности передающего устройства, параметров ВАРУ;
- передачу информации о техническом состоянии аппаратуры и индикацию ее на местной панели управления.
Электропитание ВРЛ от сети 220 В 50 Гц и ± 27 В.
Время готовности при включении ВРЛ не более 1 мин.
Конструкция и аппаратное построение ВРЛ обеспечивают:
- срок службы, лет, не менее 15;
- ресурс, ч, не менее 120000;
- среднюю наработку на отказ, ч, не менее 20000;
- среднее время восстановления, мин, не более 30;
- гарантийный срок эксплуатации два года.
-
Структурная схема ВРЛ «Лира-ВА» приведена на рис. 3.12.
В состав аппаратуры ВРЛ входят:
- антенно-фидерная система;
- шкаф приемо-передатчика;
- контрольный ответчик "Лира-КО".
Контрольный ответчик «ЛИРА-КО» предназначен для проверки работоспособности ВРЛ по эфиру.
Рис. 3.12. Структурная схема ВРЛ «Лира-1»
3.7.4. Моноимпульсный вторичный радиолокатор «Крона» 1.
 Общие сведения
Общие сведения
Моноимпульсный вторичный радиолокатор (МВРЛ) «КРОНА» изготовлен с использованием прогрессивных технологий:
- высокочастотные узлы приемника, передатчика выполнены по тонкопле-ночной технологии в герметичных конструкциях, заполненных инертным газом;
- излучатели и устройства диаграммообразующей системы антенны выполнены на полосковых линиях, заполненных диэлектриком;
- кабели между антенной и колонной привода, между колонной привода и запросчиком, внутри антенной системы изготовлены с использованием методов, исключающих пайку разъемов к кабелям ВЧ;
- в аппаратуре обработки используются сигнальные процессоры, ПЛИСы и высокопроизводительные ЭВМ фирмы Advantech;
- высокочастотные и механические конструкции, работающие на открытом воздухе, имеют конструктивное исполнение, устойчивое к суровым условиям окружающей среды (проверены в условиях северных, южных морей, а также пустынь Центральной Азии).
В МВРЛ «КРОНА» используется моноимпульсная технология, полностью твердотельный запросчик и антенна с большой вертикальной апертурой. Система имеет возможность модернизации до режима S через доукомплектование аппаратуры и дополнение программного обеспечения. При этом изменения во всей аппаратуре не требуется.
Технические характеристики
1. ВРЛ формирует запросные сигналы в режимах RBS и УВД в соответствии с требованиями ИКАО и ГОСТ 21800-89.
2. ВРЛ обрабатывает ответные сигналы в режимах RBS и УВД.
3. Зона обзора:
- минимальный угол места не более 0,50;
- максимальный угол места не менее 450;
- минимальная дальность не более 1 км;
- максимальная дальность не менее 400 км.
Указанная зона обеспечивается при нулевых углах закрытия и уровне ложных тревог Рл. т.=10-6.
4. Рабочие частоты:
- по каналу запроса 10300,1 МГц (в УВД и RBS);
- по каналу ответа RBS 10903 МГц;
- по каналу ответа УВД 7401,8 МГц.
Поляризация на частотах 1030 и 1090 МГц – вертикальная, на частоте 740 МГц – горизонтальная.
5. Вероятность получения дополнительной информации при нахождении ВС в главном лепестке диаграммы направленности антенной системы (ГЛДН) и при отсутствии мешающих запросных сигналов – не менее 0,98.
6. Среднеквадратическая ошибка измерения координат на выходе цифрового канала:
- по дальности  50 м;
50 м;
- по азимуту 4,8́΄ для RBS;
6΄ для УВД.
7. Разрешающая способность:
- по дальности 100 м в режиме RBS;
150 м в режиме УВД;
- по азимуту 0,60 в режиме RBS;
0,90 в режиме УВД.
8. Импульсная мощность по каналам запроса и подавления ≥ 2 кВт.
9. Чувствительность приемников суммарного, разностного каналов и каналов
подавления не хуже -116 дБ/Вт.
10. Антенная система имеет следующие параметры:
- уровень боковых лепестков диаграмм направленности суммарного и
разностного каналов -24 дБ;
- ширина диаграммы направленности в горизонтальной плоскости антенны
суммарного канала на f=1090 МГц 30; на f=740 МГц 3,50.
11.Скорость вращения: 6 об/мин для трассового и 15 об/мин для аэродромного
вариантов МВРЛ.
12. Частота повторения импульсов 150…300 Гц.
13. Антенная система обеспечивает работу ВРЛ при скорости ветра
до 30 м/с с обледенением до 5 мм и без обледенения до 40 м/с.
14. Питание: 3 фазы 380 В, частота 50 Гц по двум независимым кабелям:
Рпотр. 20 кВт – полная потребляемая мощность с подогревом и кондиционерами;
Рпотр. 6 кВт – потребляемая мощность радиоэлектронной аппаратуры (РЭА)
с вращением антенны.
15. Среднее время наработки на отказ  4000 часов.
4000 часов.
Принцип работы МВРЛ «КРОНА»
Передатчик вырабатывает в/ч сигналы по двум выходам: в каналы запроса и подавления ( МД и
МД и  ОД), которые через коммутируемые тракты ВЧ и вращающиеся переходы поступают на антенну и излучаются в пространство (рис. 3.13).
ОД), которые через коммутируемые тракты ВЧ и вращающиеся переходы поступают на антенну и излучаются в пространство (рис. 3.13).
Антенная система (АС) – плоская фазированная антенная решетка (ФАР) с излучателями. При излучении АС формирует на f=1030 МГц две диаграммы направленности (ДН): суммарную (МД) и подавления (МД), в которых передаются запросы на самолетные ответчики УВД и RBS.
При приеме АС формирует 3 ДН: суммарную , разностную  и подавления , на двух частотах - для режимов RBS и УВД. Масса антенны 450 кг. Размеры 800
и подавления , на двух частотах - для режимов RBS и УВД. Масса антенны 450 кг. Размеры 800 19010 см.
19010 см.
Антенная система представляет 2 линейные антенные решетки в горизонтальной плоскости размером 780150 см. АС состоит из 34 элементов излучения, каждый из которых представляет собой плоский вертикальный модуль 1,5 м длиной.
Принятые антенной системой от ответчиков воздушных судов сигналы ОД и МД по соответствующим каналам в/ч трактов, вращающиеся переходы поступают на переключатели комплектов, которые коммутируют принятые сигналы на входы приемников ОД и МД основного комплекта.
В приемнике ПРМ МД производится обработка сигналов в диапазоне RBS (1090 МГц), а в ПРМ ОД – в диапазоне УВД (740 МГц). В приемниках осуществляется усиление сигналов, преобразование на промежуточную частоту (fпр), детектирование, обнаружение, подавление сигналов принятых по боковым лепесткам ДНА (БЛДН) суммарного канала, преобразование сигналов суммарного и разностного в код отклонения от равносигнального направления (РСН) для определения азимута ВС. Сигналы обнаружения, цифровой код амплитуды канала и цифровой код величины отклонения от РСН поступают в процессор ответов (ПрО), где происходит первичная обработка РЛИ.
Полученная информация с ПрО поступает на процессор вторичной бработки (ПВО или ГПР – главный процессор радиолокатора).
ПВО осуществляет:
- сравнение вновь принятой РЛИ с полученной на предыдущих обзорах;
- фильтрацию ложной радиолокационной информации;
- формирование информационных кодограмм и передачу их потребителям;
- формирование кодов управления усилением приёмников (ВАРУ) и кодов управления мощностью передатчика.
Информация со шкафа запросчика через модемы по ТЛФ кабелям связи передаётся потребителям (в АС УВД и терминалы).
 Передатчик МВРЛ имеет 3 режима работы:
Передатчик МВРЛ имеет 3 режима работы:
1 - режим совмещенного запроса УВД и RBS;
2 - режим раздельных запросов УВД и RBS;
3 - режим совмещенного запроса с запросом путевой скорости.
В каждом шкафе запросчика имеется по 2 приемника – ПРМ ОД и ПРМ МД. Структура построения обоих приемников одинаковая. Отличаются они только входной частотой. Для ПРМ ОД fс=740 МГц, для ПРМ МД fс=1090 МГц. В каждом приемнике имеется 3 независимых, развязанных между собой канала: суммарный (), разностный () и подавления (). Приемники усиливают, преобразовывают сигналы и решают задачи первичной обработки сигналов. Их технические характеристики следующие:
- промежуточная частота fпр = 60 МГц;
- полоса пропускания П = 8 МГц (на уровне 3 дБ);
- динамический диапазон Д 70 дБ;
- чувствительность приемника не хуже -116 дБ/Вт;
- коэффициент шума Кш 4 дБ;
- избирательность по зеркальному каналу (60 дБ).
Устройство контроля ПРМ (УК) построено на основе микро-ЭВМ и обеспечивает:
- контроль исправности узлов ПРМ и передачу результатов контроля на контроллер АСК;
- управление модулем контрольного генератора;
- контроль чувствительности суммарного, разностного каналов и канала подавления;
- контроль идентичности (линейности, крутизны передаточных характеристик) суммарного и разностного каналов и их коррекцию на ОЗУ;
- реализацию канала преобразования разности амплитуд и каналов в угловое отклонение от РНА ( ) при контроле.
) при контроле.
Все контрольные измерения производятся на нерабочей дальности локатора после подачи импульса «ИМП. КОНТР», приходящего из секции синхронизации через устройство сопряжения ПРМ.
Устройство сопряжения ПРМ(УС) принимает сигналы синхронизации: ЗАП. ПрО (НД УВД, НД RBS), ИМП. КОНТР., СЕВЕР, ЗАП. ВАРУ и стробы режимов запроса БН, ТИ, ТрС, А, С. В УС 14-разрядный двоичный код азимута преобразуется в 8-разрядный двоичный код.
– Конец работы –
Эта тема принадлежит разделу:
Трассовые обзорные радиолокаторы ОРЛ-Т (вариант А), с максимальной дальностью действия до 400 км
Современный этап развития гражданской авиации характеризуется широким внедрением автоматизированных систем управления воздушным движением АС УВД... В условиях высокой интенсивности и плотности воздушного движения особую... Среди радиотехнических средств обеспечения полетов особое место занимают радиолокационные станции РЛС поскольку...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Вторичные радиолокаторы управления воздушным движением
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2025 allRefs.net. Все права защищены. Страница сгенерирована за: 0.022 сек.
Новости и инфо для студентов