рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Основні поняття системи та моделі. Поняття моделі. Співвідношення між моделлю та системою
Реферат Курсовая Конспект
Основні поняття системи та моделі. Поняття моделі. Співвідношення між моделлю та системою
Основні поняття системи та моделі. Поняття моделі. Співвідношення між моделлю та системою - раздел Философия, Вступ Люди...
ВСТУП
Людина постійно моделює, оскільки моделі, спрощують об’єкти і явища, допомагають людині зрозуміти реальний світ. Більше того, будь-яка наука починається з розробки простих і адекватних моделей. Під час вивчення дисциплін напрямку комп’ютерної інженерії, нас цікавитимуть моделі, створені за допомогою комп’ютера. Ця галузь діяльності називається комп’ютерним моделюванням.
Величезні можливості мають комп’ютери для розв’язування математичних задач. Числовими методами для більшості задач можна отримати лише приблизний результат. Наближені розрахунки на комп’ютерах дозволяють підвищити їхню точність і швидкість. На комп’ютерах можна знаходити не лише, наприклад, значення різних функцій і наближені розв’язки рівнянь, а й обчислювати траєкторію руху планет, складати прогнози погоди, дізнаватися дію землетрусів, зміна напрямків морських підводних течій тощо.
Моделювання у тому числі комп’ютерне, починається з постановки задачі. Яка складається з опису, мотивації та попереднього аналізу об’єкта. Наступний етап – розробка моделі. Який в свою чергу поділяється на: виділення суттєвих факторів, створення алгоритму, вибір програмного забезпечення (ПЗ) та програмування. Останній етап – комп’ютерні експерименти. Це тестування моделі, налагодження моделі, розрахунок моделі при різноманітних вхідних даних.
Процес створення комп’ютерної моделі можна уявити як шлях від постановки задачі, тобто від інформаційної моделі, і до її втілення на комп’ютер. Реалізація моделі на комп’ютері відбувається за допомогою програм.
Для розробки комп’ютерної моделі дуже важливим є вибір програмного забезпечення (ПЗ), за допомогою якого буде реалізована модель. Можливі два основних варіантів вибору – це, по-перше, прикладне ПЗ і, по друге, середовище програмування.
Припустимо, що як ПЗ було обране середовище програмування, тоді побудова комп’ютерної моделі завершує створенням програми. Якщо ж для побудови моделі обране існуюче прикладне ПЗ, то розв’язання приводить до розробки певної комп’ютерної технології.
1 Основні поняття системи та моделі
Основними поняттями в теорії і практиці моделювання об'єктів, процесів і явищ є «система» та «модель».
У перекладі з грецької «systema» — ціле, яке складається із частин; об'єднання. Термін «система» існує вже більш ніж два тисячоліття, проте різні дослідники визначають його по-різному. На сьогодні існує понад 500 визначень терміну «система». Однак, використовуючи будь-яке з них, у першу чергу потрібно мати на увазі ті завдання, які ставить перед собою дослідник. Системою може бути і один комп'ютер, і автоматизована лінія або технологічний процес, в яких комп'ютер є лише одним із компонентів, і все підприємство або кілька різних підприємств, які функціонують як єдина система в одній галузі промисловості. Те, що один дослідник визначає як систему, для іншого може бути лише компонентом більш складної системи.
Для всіх визначень системи загальним є те, що система — це цілісний комплекс взаємопов'язаних елементів, який має певну структуру і взаємодіє із зовнішнім середовищем. Структура системи — це організована сукупність зв'язків між її елементами. Під таким зв'язком розуміють можливість впливу одного елемента системи на інший. Середовище — це сукупність елементів зовнішнього світу, які не входять до складу системи, але впливають на її поведінку або властивості. Система є відкритою, якщо існує зовнішнє середовище, яке впливає на систему, і закритою, якщо воно відсутнє або з огляду на мету досліджень не враховується.
Одне з перших визначень системи (1950 рік) належить американському біологу Л. фон Берталанфі, згідно з яким система складається з деякої кількості взаємопов'язаних елементів. Оскільки між елементами системи існують певні взаємозв'язки, то мають бути структурні відношення. Таким чином, система — це щось більше, ніж сукупність елементів. Аналізуючи систему, потрібно враховувати оцінку системного (синергетичного) ефекту. Властивості системи відмінні від властивостей її елементів, і залежно від властивостей, якими цікавляться дослідники, та ж сама сукупність елементів може бути системою або ні.
1.1 Поняття моделі
Науковою основою моделювання як методу пізнання і дослідження різних об'єктів і процесів є теорія подібності, в якій головним є поняття аналогії, тобто схожості об'єктів за деякими ознаками. Подібні об'єкти називаються аналогами. Аналогія між об'єктами може встановлюватись за якісними і (або) кількісними ознаками.
У сучасній теорії керування використовуються моделі двох основних типів.
Перший тип моделей — моделі даних, які не потребують, не використовують і не відображають будь-яких гіпотез про фізичні процеси або системи, з яких ці дані отримано. До моделей даних належать усі моделі математичної статистики. Останнім часом ця сфера моделювання пов'язується з експерементально-статистичними методами і системами, що істотно розширює методологічну базу для прийняття рішень під час розв'язання завдань аналізу даних і керування.
Другий тип моделей — системні моделі, які будуються в основному на базі фізичних законів і гіпотез про те, як система структурована і, можливо, як вона функціонує. Використання системних моделей передбачає можливість працювати в технологіях віртуального моделювання — на різноманітних тренажерах і в системах реального часу (операторські, інженерні, біомедичні інтерфейси, різноманні системи діагностики і тестування, тощо). Саме системні моделі будуть ядром моделювання на сучасному етапі.
Таким чином, модель є абстракцією системи і відображає деякі її властивості. Цілі моделювання формулює дослідник. Значення цілей моделювання неможливо переоцінити. Тільки завдяки їм можна визначити сукупність властивостей модельованої системи, які повинна мати модель, тобто від мети моделювання залежить потрібний ступінь деталізації моделі.
1.2 Співвідношення між моделлю та системою
З огляду на вищеописане, модель — це абстракція; вона відображає лише частину властивостей системи, і мета моделювання — визначення рівня абстрактного опису системи, тобто рівня детальності її подання.
Модель і система знаходяться в деяких відношеннях, від яких залежить ступінь відповідності між ними. На міру відповідності між системою та моделлю вказують поняття ізоморфізму та гомоморфізму. Система та модель є ізоморфними, якщо існує взаємооднозначна відповідність між ними, завдяки якій можна перетворити одне подання на інше. Строго доведений ізоморфізм для систем різної природи дає можливість переносити знання з однієї галузі в іншу. За допомогою теорії ізоморфізму можна не тільки створювати моделі систем і процесів, але й організовувати процес моделювання.
Однак існують і менш тісні зв'язки між системою та моделлю. Це так звані гомоморфні зв'язки, які визначають однозначну відповідність лише в один бік - від моделі до системи. Система та модель є ізоморфними тільки в разі спрощення системи, тобто скорочення множини її властивостей (атрибутів) і характеристик поведінки, які впливають на простір станів системи. Зазвичай модель простіша за систему. На рисунку 1.1 схематично зображено різницю ізоморфної та гомоморфної залежностей між системою та моделлю для простору станів системи Zs і моделі Zm. Множину станів моделі Zт визначають з огляду на мету моделювання та обраний рівень абстрактного опису.
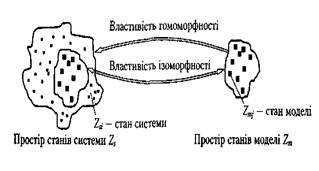
Рисунок 1.1 – Співвідношення між системою та моделлю
Отже, аналогія, абстракція та спрощення — це основні поняття, які використовуються під час моделювання систем.
Загальна характеристика проблеми моделювання
Метою процесу моделювання є створення моделі, яка в тій чи іншій формі відтворює найсуттєвіші властивості системи і несе нові знання про таку… При створенні моделей таких систем необхідно враховувати, що модель повинна… 1 Мета функціювання, яка визначає степінь цілеспрямованості моделі. У відповідності з цим моделі можуть бути розділені…Вимоги до моделей
У загальному випадку під час побудови моделі потрібно враховувати такі вимоги: - незалежність результатів розв'язання задач від конкретної фізичної… - змістовність, тобто здатність моделі відображати істотні риси і властивості реального процесу, який вивчається і…Метод статистичних випробувань
Метод статистичних випробувань — це числовий метод математичного моделювання випадкових величин, який передбачає безпосереднє включення випадкового… - розв'язувати задачу цим методом простіше, ніж будь-яким іншим; - досліджується система, функціонування якої визначається багатьма ймовірнісними параметрами елементарних явищ;Генератори випадкових чисел
Типи генераторів.Без комп'ютера використання випадкових чисел, передбачене методом статистичних випробувань, не має сенсу, тому генератори… Апаратні методи генерування випадкових чисел базуються на використанні деяких… Вбудовані в комп'ютери апаратні генератори випадкових чисел останнім часом часто використовуються в системах захисту…Випадкова дискретна величина
Для моделювання дискретної випадкової величини X зручно використовувати дискретну кумулятивну функцію. Для цього…Моделювання неперервних випадкових величин
4.7.1 Метод оберненої функції Розглянемо метод моделювання випадкової величини, яка має функцію щільності… Дійсно, якщо на осі ординат відкласти значення ri випадкової величини, розподіленої рівномірно в інтервалі [0, 1], і…Х2
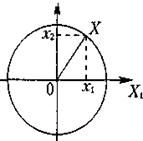
Рисунок 4.7 - Зображення вектора
для моделювання нормального розподілу
Квадрат довжини вектора в цьому випадку має розподіл χ2 з двома ступенями свободи і моделюється як окремий випадок показового розподілу з параметром λ = 1/2.
Існує два методи моделювання нормального розподілу, які використовують цю властивість:
Метод Бокса-Мюллера (Box-Muller).Генеруємо пару нормально розподілених чисел з тх = 0 і σχ = 1 за допомогою двох випадкових чисел rt і г2:
Х1 = - 2 In r1 cos (2π r1); χ2 = - 2 In r2 cos (2π r2).
Таким чином, отримуємо два числа Х1 і х2 нормальним розподілом. Метод Марсальї-Брея (Marsaglia-Bray).Існує більш швидка модифікація цього методу. Генерують два випадкових числа г і г2, вважаючи, що ν1 = -1 + 2r1; v2 = -1 + 2r2, обчислюють суму S = v1 + v2. Якщо S > 1, то повторюють процедуру, якщо S < 1, то одержують два нормально розподілених числа:
 ,
, 
Щоб одержати за цим методом 100 пар нормально розподілених чисел, потрібно генерувати 127 пар випадкових чисел. Це простий та швидкий метод, у разі його застосування більша частина часу роботи алгоритму витрачається на обчислення логарифму.
Розподіл і потоки Ерланга
Випадкові величини з експоненціальним розподілом не завжди адекватно описують деякі реальні процеси та події, наприклад час обслуговування і моменти надходження вимог до СМО. Для більш точного моделювання таких процесів доцільніше використовувати гамма-розподілені випадкові величини або ті, що мають розподіл Ерланга. Розподіл Ерланга є результатом підсумовування взаємно незалежних і однаково розподілених експоненціальних випадкових величин і є окремим випадком гамма-розподілу.
Функція щільності розподілу Ерланга k-το порядку з інтенсивністю λ має такий вигляд
Математичне сподівання і дисперсія розподілу Ерланга визначаються як М[х] = 1/kλ, D [x]=1/kλ2.
Для моделювання розподілу Ерланга використовують метод згорток випадкових величин з експоненціальними функціями розподілу. Для цього треба лише обчислити суму k експоненціально розподілених випадкових величин. Зі збільшенням k розподіл Ерланга наближається до нормального.
4.8 Статистична обробка результатів моделювання
Основою для обчислення статистичної оцінки параметра системи є реалізація випадкової величини, яка формується під час прогонів імовірнісної імітаційної моделі. Статистична оцінка також є функцією від випадкових величин, які дістають у результаті прогонів моделі, тому і згадана оцінка є випадковою величиною, закон розподілу якої залежить від закону розподілу досліджуваної випадкової величини та оцінюваного параметра. Чим більше реалізацій випадкової величини, тим точнішу статистичну оцінку параметра системи ми отримуємо. У таких умовах обробка результатів моделювання повинна провадитись лише з використанням методів і алгоритмів, які є оптимальними з погляду затрат часу та використання ресурсів комп'ютера. Під час вибору таких засобів необхідно враховувати, що всі статистичні оцінки мають бути ще й незміщеними, ефективними і спроможними.
Розглянемо деякі методи обчислення основних статистичних оцінок.
4.8.1 Оцінювання ймовірності
Оцінкою ймовірності ρ настання деякої події А є її частість:

де т — кількість випробувань, під час за яких випадкова подія спостерігалась; N — загальна кількість випробувань. Для її використання зазвичай на програмному рівні організовують два лічильники, один з яких призначено для підрахунку загальної кількості випробувань Ν, а другий — кількості успішних випробувань т.
4.8.2 Оцінювання розподілу випадкової величини
Для оцінювання функції розподілу випадкової величини, як звичайно, будується гістограма. Під час її побудови область можливих значень випадкової величини розбивають на η діапазонів і підраховують кількість попадання значень випадкової величини в конкретний інтервал - тk (k = 1,..., n). Оцінка ймовірності попадання випадкової величини в k-й. інтервал має такий вигляд:

Цю величину називають відносною частістю. У процесі моделювання під час підрахунку значень тk кожному інтервалу ставлять у відповідність окремий лічильник.
4.8.3 Оцінювання математичного сподівання
Для оцінювання математичного сподівання випадкової величини використовується формула:
де хk — значення випадкової величини, що належить k-му інтервалу; тk — кількість попадань значень випадкової величини в інтервал; N — загальна кількість випробувань. У більш простому випадку для оцінювання математичного сподівання випадкової величини можна використати звичайне середнє арифметичне:

Щоб запобігти непотрібному завантаженню пам'яті, суму доцільніше підраховувати шляхом поступового накопичення.
4.8.4 Оцінювання дисперсії
Для оцінювання дисперсії випадкової величини можна використати формулу:
де S2 — оцінка дисперсії випадкової величини х.
4.8.5 Оцінювання кореляційного моменту
Для обчислення оцінки кореляційного моменту можна використовувати формулу

При обчисленнях за цією формулою теж доцільно змінити послідовність дій.
4.9 Визначення кількості реалізацій під час моделювання випадкових величин
Точність оцінок параметрів системи, які отримують під час обробки результатів моделювання, у першу чергу залежить від кількості випробувань N. Слід враховувати, що обсяг вибірки N завжди обмежений, тому вищезгадані оцінки матимуть різні похибки і дисперсії.
Якщо треба оцінити значення деякого параметра а за результатами моделювання xi, то за його оцінку слід брати величину хі, яка є функцією від усіх значень хi. Статистична оцінка x також є випадковою величиною, тому вона буде відрізнятись від хi., тобто

де ε - точність або похибка оцінки. Імовірність того, що ця нерівність виконується, позначимо через α:
У теорії ймовірностей ε — це довірчий інтервал для а, довжина якого фактично дорівнює 2ε, а α: — довірчий рівень, або надійність оцінки. Вираз (4.13) можна застосувати для визначення точності результатів статистичних випробувань.
4.9.1 Оцінювання ймовірності
Припустимо, що метою моделювання є оцінювання ймовірності настання деякої події А, яка визначає стан системи. У кожній з N реалізацій процесу настання події А є випадковою величиною ξ, що набуває значення x1 = 1 з імовірністю ρ і x2 = 0 з імовірністю 1-р. Тоді можна визначити математичне сподівання і дисперсію відповідно за формулами
Μ[ξ]=x1ρ+x2(1-ρ)=ρ, (4.14)
D [ξ] = (x1 - Μ [ξ])2ρ + (x2 - Μ [ξ])2 (1- ρ)=ρ (1- ρ).
(4.15)
Як оцінку р використовують частість настання події А. Ця оцінка є незміщеною, спроможною та ефективною. За умови, що N задано, для отримання цієї оцінки достатньо накопичувати т:

де xi — настання події А в реалізації і.
За формулами (4.14), (4.16) визначимо вибіркове математичне сподівання
Μ[m/N] = ρ і дисперсію D[m/Ν] =ρ(1-ρ)/(Ν-1).
Згідно з центральною граничною теоремою (у даному випадку її можна взяти у вигляді теореми Хінчина) випадкова величина m/N буде мати розподіл, близький до нормального (рис. 4.8). Тому для кожного рівня достовірності α з таблиць нормального розподілу можна

знайти таку величину tα, при якій точність обчислюватиметься за формулою
Якщо α = 0,05, то ta = 1,96, а якщо α = 0,003, то tα= 3.
Підставимо у формулу (4.17) вираз дисперсії  . Звідси
. Звідси
 (4.18)
(4.18)
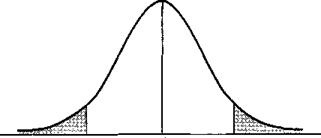
Рисунок 4.8 - Функція нормального розподілу для побудови довірчого інтервалу
З формули (4.18) видно, що при ρ = 1 або ρ = 0, кількість реалізацій, які необхідно провести для підтвердження того, що подія А настає (або ні), дорівнює одиниці. Але оскільки ймовірність ρ заздалегідь невідома, провадять випробування (Ν = 50 ... 100), оцінюють частість m/Ν і підставляють її значення у вираз (4.18) замість р, після чого визначають остаточну кількість реалізацій. Графік залежності числа реалізацій для α = 0,05 і різних значень р, якщо ε = 0,05, наведено на рис. 4.9.
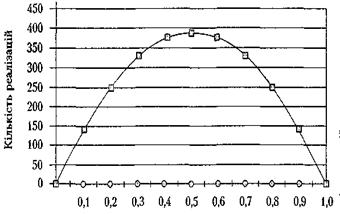
Рисунок 4.9 - Залежність числа реалізацій від значень імовірності
4.9.2 Оцінювання середнього значення
Нехай випадкова величина має математичне сподівання а і дисперсію σ2. У і-й реалізації вона набуває значення хi. Як оцінку математичного сподівання а використаємо середнє арифметичне:
 (4.19)
(4.19)
Згідно з центральною граничною теоремою при великих значеннях N середнє арифметичне (4.19) буде мати нормальний розподіл з математичним сподіванням а і дисперсією σ2/(Ν -1). Тоді

Звідси
N = tα 2 σ2/ε2+ 1 (4.20)
Оскільки дисперсія σ2 випадкової величини невідома, потрібно провести кілька десятків (50 ... 100) випробувань і знайти оцінку σ2, а потім отримане значення підставити у формулу (4.20), щоб визначити необхідну кількість реалізацій N. У цьому випадку замість нормально розподіленої величини необхідно скористатись t-розподілом Стьюдента з N - 1 ступенями свободи для визначення tα. Зауважимо, що за збільшення ступенів вільності t-розподіл наближається до нормального. З практичного погляду, якщо N більше 30, користуються нормальним розподілом.
МОДЕЛЮВАННЯ СИСТЕМ МАСОВОГО ОБСЛУГОВУВАННЯ
У теорії і практиці моделювання систем важливе місце посідають моделі СМО.… Існує розвинутий математичний апарат теорії масового обслуговування (називається теорія черги), що дає змогу…Характеристики СМО
СМО – це такі системи, в які в випадкові моменти часу поступають заявки на обслуговування, при цьому заявки, які поступили на обслуговування,… У будь-якій системі обслуговування передбачена наявність пристроїв для… З позиції моделювання, процеси формування черги в СМО можна представити наступним чином. Заявка поступає на…Час обслуговування
В СМО час обслуговування різних задач потоку може бути як постійною, так і випадковою величиною, що залежить від характеру потоку та показників… V(t) = P{T < t} , при t > 0, яка визначає ймовірність того, що випадкове значення часу обслуговування Тобсл. не буде перевищувати задане число t.…Правила обслуговування вимог
Обслуговування може бути організоване за допомогою одного або кількох ідентичних пристроїв. У першому випадку система називається одноканальною, у… Якщо пристрої для обслуговування об’єднані в ланцюжок, то система називається… Дисципліна обслуговування визначає, за яких умов припиняється обслуговування вимог, як обирається для обслуговування…Режими роботи системи масового обслуговування
На практиці часто доводиться вивчати режими роботи СМО, за допомогою яких описується деякий виробничий процес або система обробки інформації. Якщо в системі пристрої для обслуговування час від часу виходять з ладу, то вводиться поняття режим відмови. Під час дослідження деяких систем треба брати до уваги ще один режим — блокування обслуговування, пов'язаний з тимчасовим перериванням або сповільненням процесу обслуговування.
Зміна режиму роботи СМО може бути зумовлена зовнішнім впливом (наприклад, тимчасовою відсутністю деталей у технологічному процесі, ремонтом обладнання тощо) або виходом із ладу деякого пристрою системи (наприклад, блока живлення в комп'ютері).
Типи моделей систем масового обслуговування
Найпоширенішою моделлю, яка розглядається в теорії масового обслуговування, є модель типу М/М/1. Ця модель має тільки один пристрій для… Модель типу D/D/1 – детермінована, а модель D/M/1 — змішана. Якщо відомостей… У теорії масового обслуговування аналітичні результати отримано тільки для моделей типів D/D/1, М/М/1 і М/G/1. Для…Формула Литтла
Приклад 5.1.
Інтенсивність потоку задач – λ = 1,0 в хв. Середній час обслуговування – 1,8 хв. Потік заявок і потік обслуговування – найпростіші.Рисунок 5.5 - Багатоканальна СМО
Для системи, яка складається з m однакових пристроїв для обслуговування коефіцієнт завантаження,  де
де -середній час обслуговування вимоги в черзі.
-середній час обслуговування вимоги в черзі.
Для багато канальної СМО - ρ -значення математичного очікування частки зайнятих пристроїв.
Приклад 5.2.
Рисунок 6.2 - Замкнена мережа
Якщо маємо мережу, яка взаємодіє з зовнішнім середовищем, то його позначаємо як вузол D мережі.
qi – ймовірність, з якою потоки надходять до і-го вузла мережі.
У сталому режимі роботи мережі для всіх потоків справедливий закон про сумарні потоки :
 ,
, 
де , N – кількість вузлів.
6.1 Операційний аналіз мереж
Операційний аналіз мереж системи базується на таких положеннях :
- усі припущення щодо властивостей вхідних і вихідних змінних системи можна перевірити шляхом вимірювань впродовж кінцевого проміжку часу параметрів функціонування реальної системи або її моделі.
У системі повинен існувати баланс потоків вимог: кількість вимог, які залишили систему протягом деякого часу спостереження дорівнює кількості вимог, що надійшли в систему за цей ж період.
Пристрої для обслуговування мають бути однорідними; надходження вимог до вузла не повинні залежати від довжини черги у вузлах і часу закінчення обслуговування пристроями.
Основні показники
1) середній час перебування вимог в окремих вузлах;
2) середній час завантаження пристроїв у вузлах;
3) середня довжина черг до вузлів і т.д.
Більшість рез. в операційному аналізу стосуються замкнених мереж але якщо в мережі є черга, то завжди можна вважати, що одна вимога покинула систему і надійшла інша з такими ж параметрами.
Операційні змінні
q0j – імовірність (частота) надходження зовнішніх вимог до вузла j ( ), де k – загальна кількість вузлів.
), де k – загальна кількість вузлів.
qkj – імовірність (частота) надходження зовнішніх вимог від k-го вузла до j-го.
qk0 – після k-го вузла вимога залишає систему.
Аk – кількість вимог, що надійшли до вузла k.
Ckj – кількість вимог, що залишили вузол k і надійшли до j-го вузла.
Bk – загальний час обслуговування вимоги у вузлі k.
Т – загальний час спостереження за системою.
 ,
,  ,
, 
Для замкненої мережі виконується умова А0 = С0
Серед операційних змінних найчастіше застосовують:
1) коефіцієнт використання вузла k:
 (6.1)
(6.1)
2) середній час обслуговування у вузлі k:
 (6.2)
(6.2)
де Bk – час обслуговування вимоги у вузлі k
Ck – кількість вимог, що покинули вузол k
3) інтенсивність вихідного потоку вимог від вузла k:
 (6.3)
(6.3)
4) відносну частоту переміщення між вузлами k і j:

5) з формул (2) – (4) виведемо коефіцієнт використання вузла
 , за умови, що
, за умови, що
 (6.4)
(6.4)
Розглянемо основні операційні залежності, які грунтуються на гіпотезі про баланс потоків у мережі.
1) Запишемо рівняння балансу потоків вимог:
 ,
, (6.6)
(6.6)
2) Продуктивність вузла, тобто інтенсивність з якою вимоги залишають вузол k:
 (6.7)
(6.7)
3) Коефіцієнт відвідування вузла k вимогами:
 , (6.8)
, (6.8)
де
Х0 – інтенсивність вхідного потоку зовнішніх вимог
4) Запишемо рівняння балансу через коефіцієнти відвідування (поділимо (6.6) на Х0)
V0 = 1 ,  ,
,  (6.9)
(6.9)
Зв’язок коефіцієнтів відвідування та продуктивності вузла визначаємо:

5) Середній час R перебування вимог у мережі:
 , де
, де
Rk – час перебування вимог у вузлі k
Wk – сумарний час обслуговування та очікування вимог у вузлі k.
Отже,
 (6.10)
(6.10)
6) Середня кількість вимог у мережі N визначається через середню кількість вимог у кожному вузлі nk :
 , де
, де
 (6.11)
(6.11)
Для середнього часу перебування вимог у мережі справедливий закон Літтла, тобто його можна визначити через середню кількість вимог у ньому та інтенсивність потоку:
 (6.12)
(6.12)
і для всієї мережі:
 (6.13)
(6.13)
Якщо є замкнена мережа з M пристроями і середній час обслуговування вимог кожним з них дорівнює Z, то середній час перебування вимог в мережі:
 (6.14)
(6.14)
Приклад 6.1
Приклад 6.2
Нехай, М = 40 пристроїв для обчислення. Середній час обчислення кожним пристроєм Z = 15c. Відомо такі дані: 1) Середній час перебування вимог, які надходять до мережі від 40 пристроїв для обчислення = 5 с (R*).Правила маркування
1 Перехід збуджується тоді, коли число, яке визначає кількість маркерів у кожному вхідному вузлі > або = 1;
2 Якщо збуджений перехід спрацьовує, то число маркерів у всіх вхідних вузлах, які містять маркери, зменшується на 1, у всіх вихідних вузлах збільшується на 1. Кількість маркерів не можу бути меншою за 0.
Приклад 6.3
– Конец работы –
Используемые теги: Основні, Поняття, системи, Моделі, Поняття, Моделі, Співвідношення, між, моделлю, системою0.12
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Основні поняття системи та моделі. Поняття моделі. Співвідношення між моделлю та системою
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.191 сек.
Новости и инфо для студентов