рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Складання розв’язувальної системи рівнянь для визначення основних невідомих
Реферат Курсовая Конспект
Складання розв’язувальної системи рівнянь для визначення основних невідомих
Складання розв’язувальної системи рівнянь для визначення основних невідомих - раздел Философия, РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ Розглянемо Плоску Рамну Конструкцію. У Довільному Вузлі ...
Розглянемо плоску рамну конструкцію. У довільному вузлі  рами можуть мати місце три переміщення: кут повороту
рами можуть мати місце три переміщення: кут повороту  , горизонтальне переміщення
, горизонтальне переміщення  й вертикальне переміщення
й вертикальне переміщення  . Коли система має
. Коли система має  незакріплених вузлів, вона має
незакріплених вузлів, вона має  невідомих переміщень, які і є основними невідомими методу. Якщо на вузли стержневої системи накладено
невідомих переміщень, які і є основними невідомими методу. Якщо на вузли стержневої системи накладено  в'язів, то число основних невідомих методу переміщень (ступінь кінематичної невизначеності) дорівнює
в'язів, то число основних невідомих методу переміщень (ступінь кінематичної невизначеності) дорівнює

На рисунку 2.13 показано вузол рами з пов'язаними з ним стержнями  .
.
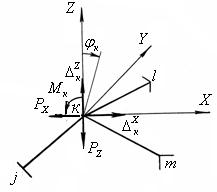
Рисунок 2.13 – Додатні напрямки координатних осей, зовнішнього навантаження  та компонентів переміщення вузла
та компонентів переміщення вузла
На вузол діють компоненти зовнішнього навантаження . На рисунку 2.13 показані додатні напрямки координатних осей і компоненти переміщення вузла . Кут повороту вузла додатний, якщо він спрямований проти руху годинникової стрілки при погляді з додатного кінця осі  . Лінійні переміщення
. Лінійні переміщення  й
й  додатні, якщо спрямовані уздовж відповідних осей
додатні, якщо спрямовані уздовж відповідних осей  та
та  .
.
На рисунку 2.14 показано вузол с додатним вузловим навантаженням, а також з кінцевими зусиллями стержнів, що примикають до вузла.
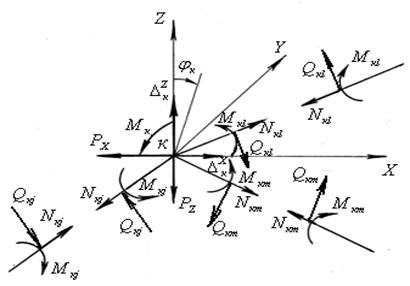
Рисунок 2.14 - Вузол с додатним вузловим навантаженням та з кінцевими зусиллями
стержнів, що примикають до вузла.
Для кожного вузла можна скласти стільки рівнянь рівноваги, скільки невідомих переміщень у вузлі. У загальному випадку вузол плоскої рами має 3 переміщення й для нього можна скласти 3 рівняння рівноваги:

Тут підсумовування поширюється на всі стержні, що сходяться у вузлі .
Величини  , що входять у рівняння (2.9), необхідно виразити за допомогою основних залежностей методу переміщень через компоненти переміщень вузлів. Склавши стільки рівнянь рівноваги, скільки є невідомих у намічених вузлах, і, виразивши зусилля, що ввійшли в них, через переміщення вузлів, одержимо розв’язувальну систему рівнянь методу переміщень.
, що входять у рівняння (2.9), необхідно виразити за допомогою основних залежностей методу переміщень через компоненти переміщень вузлів. Склавши стільки рівнянь рівноваги, скільки є невідомих у намічених вузлах, і, виразивши зусилля, що ввійшли в них, через переміщення вузлів, одержимо розв’язувальну систему рівнянь методу переміщень.
– Конец работы –
Эта тема принадлежит разделу:
РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ
НАВЧАЛЬНО МЕТОДИЧНИЙ КОМПЛЕКС РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Складання розв’язувальної системи рівнянь для визначення основних невідомих
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.016 сек.
Новости и инфо для студентов