рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Подвижной состав железных дорог
Реферат Курсовая Конспект
Подвижной состав железных дорог
Подвижной состав железных дорог - раздел Образование, Федеральное Агентство Железнодорожного Транспорта...
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное Государственное Бюджетное образовательное учреждение высшего профессионального образования
«МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
(МИИТ)
7/1/7
Одобрено кафедрой Утверждено:
«Начертательная геометрия деканом факультета
и инженерная графика» «Транспортные средства»
НАЧЕРТАТЕЛЬНАЯ ГЕОМЕТРИЯ И
ИНЖЕНЕРНАЯ ГРАФИКА
Чертежи машиностроительные
Задание на контрольную работу с
Методическими указаниями
Для студентов 1 курса
Направлений:
Техносферная безопасность
Теплоэнергетика и теплотехника
Управление в технических системах
Наземные транспортно-технологические комплексы
Инфокоммуникационные технологии и системы связи
Информационные системы и технологии
Технология транспортных процессов
Строительство
Специальностей:
Эксплуатация железных дорог
Системы обеспечения движения поездов
Строительство ж.д. мостов и транспортных тоннелей
Наземные транспортно-технологические средства
Подвижной состав железных дорог
Москва 2012 ОБЩИЕ УКАЗАНИЯОСНОВНЫЕ ПОЗИЦИОННЫЕ ЗАДАЧИ (ЭПЮР 1)
Задания 1 – 4 по начертательной геометрии связаны с построением комплексного чертежа Монжа, аксонометрического чертежа (прямоугольной изометрии) и… Для решения перечисленных задач используется пирамида, заданная координатами… Десять вариантов заданий приведены в табл.1. Номер варианта выбирают по последней цифре учебного шифра.Таблица 1
| Вариант | A(X,Y,Z) | B(X,Y,Z) | C(X,Y,Z) | D(X,Y,Z) |
| 40,20,50 | 0,70,20 | 0,20,70 | 10,50,0 | |
| 40,40,100 | 40,100,20 | 20,80,40 | 90,60,40 | |
| 40,50,60 | 60,90,40 | 20,100,100 | 70,50,90 | |
| 30,50,40 | 80,70,40 | 50,100,40 | 40,70,80 | |
| 100,60,60 | 20,80,20 | 60,80,90 | 40,100,30 | |
| 10,80,20 | 50,20,60 | 50,70,40 | 40,100,90 | |
| 60,60,50 | 40,90,50 | 40,60,110 | 60,90,30 | |
| 70,20,20 | 50,70,70 | 50,30,10 | 20,30,70 | |
| 80,60,40 | 100,50,50 | 50,60,80 | 80,100,70 | |
| 70,70,30 | 60,50,80 | 30,50,80 | 80,40,10 |

Рис. 1
Задания 1 – 4 выполняются на формате А3 (420Х297) карандашом с помощью чертежных инструментов и компонуются согласно рис. 1.
Если исходные данные затрудняют компоновку всех трех заданий на одном листе, то задания 3 и 4 могут быть выполнены на отдельном формате А3. Задания 3 и 4 должны быть снабжены пояснениями (см. рис. 1), содержание которых объяснено ниже. Все надписи выполняют чертежными шрифтами А3, 5 либо А5 (наклонным).
ЗАДАНИЕ 1
Последовательность выполнения задания 1 представлена на рис. 2. Задают систему координат на комплексном чертеже Монжа [1], рис. 2, а. Буквами X,Y,Z обозначены оси координат. Если в конкретном варианте задано отрицательное значение, то оно должно быть отложено от нуля в противоположном направлении (-X,-Y,-Z), рис. 2,а.
На комплексном чертеже по исходным данным строят парные проекции четырех точек – A,B,C,D: (A1,A2); (B1,B2); (C1,C2); (D1,D2)/. Индекс «два» используют для обозначения проекций на фронтальную плоскость П2 (или V), «один» - на горизонтальную плоскость П1 (или H).
Точки соединяются попарно тонкими линиями на каждой из проекций (рис. 2, в).
Видимость «конкурирующих» ребер пирамиды определяется по принципу «выше-ниже», «дальше-ближе». Видимые ребра обводят сплошной основной линией, невидимые – штриховой, толщиной s/3 (рис. 2, г).
Рис. 2, г является первым готовым фрагментом листа задания (см. рис.1).
ЗАДАНИЕ 2
Последовательность выполнения задания представлена на рис. 3.
Задается: изометрическая система координат с осями, направленными друг относительно друга под углом 1200 (см. ГОСТ – 2.317-69, рис. 3, а [ 1,2].

Рис. 2
Строят единственную проекцию каждой точки по схеме, представленной на рис. 3, б.
Построенные проекции A, B, C, D соединяют попарно тонкими линиями (рис. 3, в).
Оценивают видимость «конкурирующих» ребер (AC и BD) по принципу «дальше-ближе» с помощью комплексного чертежа (рис. 2, г). Стрелка В показывает направление взгляда в аксонометрии. Легко видеть, что ребро АС расположено на переднем плане и является видимым. Следовательно, ребро BD невидимое и должно быть показано штриховой линией (рис. 3, г).
Рис. 3, г может быть перенесен на формат в качестве второго задания. Здесь же необходимо показать тонкими линиями координатное построение вершин пирамиды.

Рис. 3
ЗАДАНИЕ 3
Последовательность выполнения задания представлена на рис. 4.
Требуется построить следы плоскости боковой грани АВС заданной пирамиды. Напомним [3], что след плоскости – это прямая пересечения заданной плоскости с плоскостью проекций. Плоскоcть общего положения пересекается и с фронтальной П2 (V), и с горизонтальной П1 (H) плоскостями проекций, поэтому и следов будет два: a1 и a2. Если плоскость занимает особое (частное) положение в пространстве, то она может иметь единственный след. Например, горизонтальная плоскость имеет единственный след на плоскости проекций П2 (V) в виде горизонтальной прямой.
Итак, зададим плоскость боковой грани АВС проекциями названных точек, рис. 4, а.

Рис. 4
Чтобы построить след плоскости, достаточно построить следы двух любых прямых, принадлежащих этой плоскости, и соединить их одноименные проекции. Выбираем прямые АС и ВС.
Строим горизонтальный след прямой АС – точку М1 пересечения указанной прямой с плоскостью П1 (H), рис.4, б. Горизонтальный след прямой ВС совпадает с проекцией В1, поскольку точка В расположена непосредственно на горизонтальной плоскости проекций. Соединяя проекции М1 и М1`, строим горизонтальный след a1 плоскости боковой грани АВС.
Описанные построения могут быть представлены стандартными обозначениями:
МÎ(АС)LМÎП1,
где Î - принадлежит;
L - объединение «и».
Запись означает: точка М принадлежит прямой АС и одновременно точка М принадлежит плоскости П1 (Н).
Аналогично читается вторая строка на рис. 1:
М`Î(AB)LM`ÎП1.
Следующая строка показывает, что прямая (след) включает (Ì) точки М и М` в плоскости П1(Н):
a1Ì(М, М`)ÌП1.
Точка пересечения горизонтального следа a1 с осью ОХ обозначена Хa (рис. 4, б). Очевидно, что для построения фронтального следа a2 достаточно построить только один фронтальный след любой из прямых, принадлежащих заданной плоскости боковой грани АВС. Например, прямой АС на рис. 4, б. След N=N2 строят по схеме, приведенной для точки М.
Соединяя точки Хa и N2, строят искомый фронтальный след a2 плоскости боковой грани АВС.
ЗАДАНИЕ 4
Последовательность выполнения задания представлена на рис. 5.
Требуется построить плоскость, параллельную плоскости боковой грани АВС (a1, a2) и проходящую через вершину пирамиды D. Исходные данные для этой задачи представлены на рис. 5, а.
Если искомая плоскость параллельна заданной, то ее следы параллельны следам заданной плоскости (a1,a2).Поэтому достаточно построить единственную точку на пересечении искомой плоскости с любой из плоскостей проекций П1(H) либо П2(V)) и задача будет решена.

Рис. 5
Построим в точке D горизонталь h [3]. Очевидно, что ее проекция h1 будет обязательно параллельна следу a1, иначе нарушаются условия параллельности плоскостей (рис. 5, б).
Таким образом, легко строится точка 1(11,12) пересечения горизонтали h с фронтальной плоскостью проекций П2 (V). Это и есть искомая точка, через которую должны быть проведены следы b2 и далее b1 искомой плоскости:
h'DLh1||a1;
12Îb2Lb2||a2, b1||a1.
Аналогичные построения могут быть выполнены с помощью фронтали f (f1,f2), проведенной через точку D. На рис. 1 приведены оба варианта построений. При выполнении заданий студент должен воспользоваться либо построением горизонтали h, либо фронтали f. Пояснения к рещению задачи 4 даются только для выбранного варианта решения.
ОБЩИЕ РЕКОМЕНДАЦИИ
Как видно из примера рис. 1, задачи 3 и 4 компонуются на одном чертеже. Полученные решения необходимо выделить цветными карандашами. Например, лучи… Измерения координат необходимо выполнять в натуральном масштабе миллиметровой… В случае необходимости задачи 3 и 4 могут быть представлены на различных чертежах аналогично рис. 4,б и 5, б.ОСНОВНЫЕ МЕТРИЧЕСКИЕ
ЗАДАЧИ (ЭПЮР 2)
Краткие методические указания
К заданиям 5,6,7
На практике очень часто приходится определять величину и форму геометрических объектов, изображенных на чертеже. Задачи, связанные с этим, принято называть метрическими.
Величина и форма геометрического объекта связана с параметрами его формы, которые на чертеже реализуются размерами. Такая реализация возможна при условии отображения на чертеже систем координат, в которых исчисляются размеры линейных протяженностей и углов.
Чертежи, удовлетворяющие этому условию, называются метрически определенными. Примером является чертеж, построенный по схеме эпюра Монжа, аксонометрический чертеж и т.д.
Измерения геометрических элементов в пространстве базируются на оценке длин отрезков, соединяющих пару точек, и на построении взаимноперпендикулярных фигур. Например, для измерения расстояния от точки до прямой необходимо опустить на прямую из точки перпендикуляр, построить его основание и оценить длину полученного отрезка. Аналогичную технологию применяют для определения расстояния от точки до плоскости, между двумя плоскостями и т.д.
При решении таких задач на чертеже следует опираться на свойства проецирования, а также учитывать искажения фигур в процессе их отображения из пространства на плоскость проекций.
При ортогональном проецировании отрезка прямой, параллельной плоскости проекций, его длина не искажается.

Рис. 6 Рис. 7
На рис. 6 показан отрезок АВ||П1. Этот отрезок ортогонально проецируется на П1 без искажения длины. Не искажается также угол наклона этого отрезка w по отношению к плоскости П2. Отрезок АВ является горизонталью. Аналогичные рассуждения могут быть сделаны относительно фронтали – отрезка параллельного П2. Отрезок общего положения проецируется на плоскости проекций с искажением длины. Это видно из рис. 6 на примере отрезка СD, у которого отрезок С1 = С1D1 является катетом в прямоугольном треугольнике С1D. Отрезок СD в этом треугольнике является гипотенузой, которая длиннее катета. На рис 7 показаны треугольные отсеки АВС и DEF плоскостей, перпендикулярных одной из плоскостей проекций.
Из геометрии известен признак перпендикулярности двух плоскостей: плоскость a перпендикулярна плоскости b, если она содержит прямую перпендикулярную к этой плоскости. Из чертежа видно, что АВС^П1, так как она содержит фронталь 1,2^П1. Заметим, что плоскость АВС при этом стала горизонтально проецирующей, а ее проекция на П1 «выродилась» в прямую.
Фронталь 1,2 спроецировалась в точку, рис. 7. Аналогичные рассуждения справедливы для плоскости DEF^П 2 и ее горизонтали F3, рис. 7.
Перейдем теперь к эпюру Монжа. На рис. 8 в системе координат OXYZ, развернутой в эпюр, показан чертеж отрезка горизонтали АВ и СD общего положения. Проекции отрезка СD на плоскостях проекций П1 и П2 не равны по длине самому отрезку. Поставим задачу определения истинной длины отрезка СD по его проекциям. Используем рис. 6, на котором показан прямоугольный треугольник CD1. В этом треугольнике отрезок СD является гипотенузой, а катетами являются отрезок С1 = С1D и отрезок D1 = DD1 – СС1. Этот треугольник можно построить, используя информацию из эпюра отрезка CD на рис. 8. Оба катета на чертеже имеются и треугольник можно построить. На рис. 8 задача решена двумя методами. Во втором случае использована проекция C2D2, а также разность расстояний от концов проекции C1D1 до оси ОХ12 (рис. 8). Этот способ построения истинной величины отрезка известен как метод прямоугольного треугольника. В дальнейшем этот метод нам понадобится.
Построение взаимно перпендикулярных фигур на чертеже основывается на теореме о проецировании прямого угла.
Прямой угол ортогонально проецируется без искажения своей величины, если одна из его сторон параллельна плоскости проекций.

Рис. 8 Рис. 9
На рис. 9 приведены две задачи, иллюстрирующие применение этой теоремы.
В левой части эпюра задана горизонталь а двумя своими проекциями а1,а2 и точка В (ее проекции В1 и В2). Требуется определить истинную величину расстояния от точки В до горизонтали а. Для начала необходимо опустить перпендикуляр из В на а. Поскольку а параллельна П1, то прямой угол между искомым перпендикуляром и горизонталью проецируется на П1 без искажения. Строим перпендикуляр из В1 на а1. Отмечаем основание К1. Построение фронтальной проекции перпендикуляра ВК трудностей не составляет. Прямой угол на проекции здесь исказился в полном соответствии с теоремой о проецировании прямого угла. Имеем две проекции искомого расстояния. Теперь методом прямоугольного треугольника стоим отрезок К11, длина которого равна искомому расстоянию.
В правой части эпюра построены проекции треугольника DEF, перпендикулярного плоскости проекций П2. Для этого в треугольнике проведена прямая, перпендикулярная П2. Такой прямой будет горизонталь F3, ее проекция F131^ОХ12. В пространстве ось ОХ12 принадлежит плоскостям П1 и П2, а горизонталь F131 – П1. В полном согласии с теоремой, проекция F131^ OX12 (рис. 9).
Рассмотренный метод прямоугольного треугольника и теорема о проецировании прямого угла являются базовыми для формирования способов преобразования чертежа.
Под преобразованием чертежа будем понимать формирование на основе исходных данных проекций объекта некоторых новых его проекций, способствующих решению конкретной задачи (в частности метрической).
Поскольку исходные и новые проекции являются изображениями одного и того же объекта, форма и величина последнего не должны искажаться в процессе преобразования исходных проекций в новые. Такое условие выполняется в том случае, когда расстояние между парой произвольных точек объекта остается неизменным. Но, как мы видели выше, такое условие будет выполнено, если катет прямоугольного треугольника, формирующего расстояние между двумя точками, остается неизменным (метод прямоугольного треугольника). Выполнение этого условия обеспечивается тем, что одна из проекций преобразуемого чертежа должна оставаться неизменной по форме и величине (один из катетов). От другой исходной проекции должны оставаться неизменными расстояния (либо разности расстояний) от конечных точек проекций отрезков до оси, разделяющей исходные проекции.
На рис. 10 исходные проекции отрезка АВ, А1В1 и А2В2 преобразованы в проекции того же отрезка. При этом, после преобразования фронтальная проекция `А2`В2 осталась равной исходной проекции А2В2, но расположена в новом положении параллельно оси ОХ12. Проекция `А1`В1 расположилась так, что конечные точки проекции сопряжены с соответствующими точками фронтальной проекции линиями связи.
В новом чертеже отрезок АВ расположен параллельно П1 и поэтому |`А1`В1|=|АВ|. На чертеже рис.10 проведено еще одно преобразование, в результате которого отрезок АВ стал перпендикулярным П2.
Способы преобразования, основанные на перемещениях проекций объекта относительно неподвижной системы координат, называются способами перемещения (перемещение может быть вращением объекта в пространстве и т.п.). Однако можно, оставляя объект неподвижным, заменять исходную систему координат, разворачивая ее каждый раз в эпюр. Такие способы называются способами замены плоскостей замены (плоскостей координат). Во всех способах остаются постоянными те условия, которые формируют способ прямоугольного треугольника. Можно считать катеты прямоугольного треугольника инвариантами любого преобразования чертежа, сохраняющегося форму и величину объекта.

Рис.11 Рис.10
На рис.11, 12, 13 приведены примеры решения метрических задач с применением способов преобразования чертежа и теоремы о проецировании прямого угла.
На чертеже рис 11 задана плоскость АВС и точка D. В задаче требуется построить истинное расстояние от точки D до плоскости АВС.
Для решения задачи построены проекции перпендикуляра из точки D на АВС. Для определения этих проекций выполнено условие теоремы о проецировании прямого угла. В плоскости АВС построены горизонталь и фронталь. Горизонтальная проекция перпендикуляра представлена как прямая, перпендикулярная горизонтальной проекции h1 горизонтали. Фронтальная проекция перпендикуляра перпендикулярна фронтальной проекции f2 фронтали. Для построении точки пересечения перпендикуляра с плоскостью АВС и истинной величины расстояния от точки D до АВС выполнено преобразование исходных проекций переменой плоскостей проекций. Новая проекция плоскости АВС и точки D выполнено на плоскость П7, перпендикулярную горизонтали плоскости АВС. При этом плоскость АВС стала проецирующей, а перпендикуляр к ней спроецировался без искажения прямого угла. Точка К7 является точкой пересечения перпендикуляра с плоскостью, а отрезок D7К7 – истинной величиной расстояния от точки D до плоскости АВС.
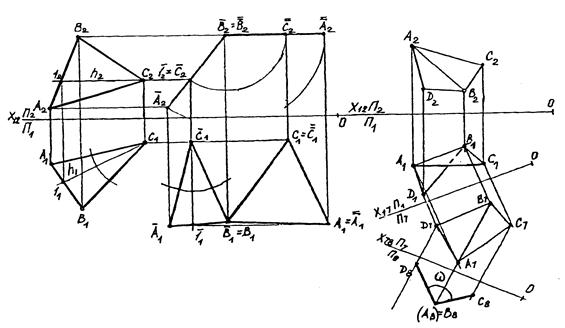
Рис.12 Рис.13
На чертеже рис.12 задана плоскость треугольником АВС. Требуется преобразованием исходного чертежа построить истинную величину треугольника АВС. Преобразуем чертеж перемещением треугольника АВС в пространстве при неизменной системе координат и плоскостей проекций.
Очевидно, что треугольник АВС спроецируется без искажения величины в том случае, когда его плоскость будет параллельна одной из плоскостей проекции. При этом треугольник будет перпендикулярен другой плоскости проекций. Переместим треугольник в положение при котором он будет перпендикулярен, например, плоскости П2. Для этого постоим в треугольнике горизонталь (рис.12) и произведем преобразование с соблюдением постоянства условий к формирования прямоугольного треугольника. На рис.12 не изменилась форма и величина горизонтальной проекции АВС и расстояния от фронтальных проекций вершин треугольника до оси ОХ. После преобразования треугольник стал фронтально проецирующей плоскостью (сравните рис.9, справа). Повторным перемещением добиваемся параллельности треугольника плоскости П1. Проекция А1В1С1 представляет треугольник АВС истинную величину.
Наконец, рис.13 представляет собой решение задачи построения истинной величины линейного угла, измеряющего двугранный угол DАВС с ребром АВ. Из геометрии известно, что линейный угол двугранного угла измеряется в плоскости, перпендикулярной ребру двугранного угла. Отсюда следует, что двугранный угол необходимо переместить в пространстве так, чтобы ребро было перпендикулярно плоскости проекций, на которой мы хотим получить истинную величину линейного угла.
Если считать, что на рис.11 отрезок АВ представляет собой ребро двугранного угла, то все преобразования на рис.13 совершено аналогичны преобразования АВ на рис.11. разница в том, что на рис.13 вместе с АВ преобразуются точки С и D. Угол w на рис.13 представляет собой истинную величину линейного угла, измеряющего исходный двугранный угол DАВС.
Варианты заданий и указания по оформлению чертежей
Варианты заданий выбирают из таблицы 2. Выбор варианта производят по последний цифре номера студенческого билета или индивидуального шифра студента. Из соответствующей строки таблицы выбирают координаты точек А, В, С, D, которые являются исходными для задач контрольной работы.
Таблица 2
Координаты точек (в мм) к заданиям 5…7
| Вариант | А (х, у, z) | В (х, у, z) | С (х, у, z) | D (х, у, z) |
| 40,20,50 40,40,100 40,50,50 30,50,40 100,60,60 0,80,20 60,60,50 70,20,20 80,60,40 70,70,30 | 70,70,20 0,10,70 0,20,70 60,10,20 80,10,20 40,20,60 40,20,0 50,70,70 50,80,70 60,20,70 | 0,40,10 70,20,40 30,80,90 0,30,10 60,20,70 50,50,0 10,80,20 80,40,10 30,10,30 10,60,10 | 0,80,50 0,50,20 0,70,30 50,40,0 30,70,20 0,30,10 0,40,70 30,10,50 70,20,60 30,80,60 |
Задания 5, 6, 7 выполняют на листе формата А3, который оформляют стандартной рамкой и учебной основной надписью, показанной на рис.14. Исходные чертежи заданий выполняют в масштабе 1:1 по координатам точек из табл.2 в мм.

Рис.14
Задание 5. Опустить высоту из вершины D на противоположную грань АВС и найти точку их пересечения.
Задание 6. Найти длину ребра АВ и угол между ребрами АВ и АD.
Задание 7. Определить угол между гранями АВС и АВD. На рис.15 приведен образец выполнения заданий 5, 6 и 7 на листе формата А3.
Перед выполнением заданий необходимо проработать материал по метрическим задачам и преобразованиям чертежа по конспектам либо по изданным текстам лекций преподавателей РГОТУПС. Наряду с этим необходимо использовать учебную литературу, указанную в списке рекомендованной литературы.

Рис.15
ВАРИАНТЫ ЗАДАНИЙ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЗАДАЧАМ 8. 9, 10 (ЭПЮР 3)
При разработке конструкторской и технологической документации различных изделий (например, сложных составных воздуховодов) часто возникает необходимость построения линий пересечения поверхностей. Линии взаимного пересечения поверхностей проще всего построить графически по точкам с помощью поверхностей-посредников. Рассмотрим сущность этого метода.
Пусть заданы две пересекающиеся поверхности Ф и q (рис. 16).
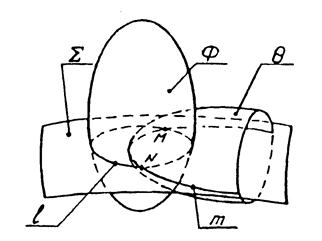
Рис. 16
Для построения точек линии пересечения этих поверхностей введем вспомогательную секущую поверхность S, которая пересечет поверхности Ф и q по линиям l и m соответственно. Линии l и m пересекутся между собой в точках M и N, поскольку они принадлежат одной поверхности S. Точки M и N будут лежать на линии пересечения поверхностей Ф и q, так как эти точки лежат одновременно на обеих пересекающихся поверхностях.
В качестве вспомогательных секущих поверхностей-посредников обычно применяют плоскости и сферы. Поэтому способы реализации метода посредников называют способами секущих плоскостей и секущих сфер.
Вспомогательные секущие плоскости в большинстве случаев параллельны плоскостям проекций. Однако в отдельных случаях для определения точек линии пересечения поверхностей рациональнее воспользоваться наклонными плоскостями (способ вращающейся или качающейся плоскости).
Способ сфер имеет две разновидности – способ эксцентрических сфер (центры секущих сфер не совпадают) и способ концентрических сфер (сферы имеют общий центр). Большинство задач на взаимопересечение поверхностей решают рассматриваемым здесь способом концентрических сфер. Способ эксцентрических сфер используют только в том случае, когда одна из пересекающихся поверхностей имеет криволинейную ось и круговые сечения.
В каждом конкретном случае выбирают тот способ построения точек линии пересечения поверхностей, который позволяет выполнить наиболее простые графические построения.
Основной алгоритм построения точек линии
Взаимного пересечения поверхностей
1. Задать на чертеже поверхность-посредник S, пересекающую заданные поверхности Ф и q по геометрически простым линиям; 2. Построить линию l пересечения поверхности Ф с поверхностью-посредником S; … 3. Построить линию m пересечения второй поверхности q с поверхностью-посредником S;Способ секущих параллельных плоскостей
Способ секущих параллельных плоскостей обычно применяют в тех случаях, когда обе пересекающиеся поверхности одновременно можно рассечь каждой из… Для построения точек 31 и 41 видимости горизонтальной проекции искомой линии…Способ секущих концентрических сфер
Способ сфер основан на свойстве пересечения двух соосных поверхностей вращения…Варианты заданий. Указания
К оформлению работы
Таким образом, каждый студент имеет индивидуальное задание из ста вариантов. Аналогично выбирают вариант задания 10 по табл. 4. Табл. 3Варианты заданий и методические указания
К задаче 8
В задаче 8 требуется построить линии пересечения сферы радиуса R=50 мм с…РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Синицын С.А. Инженерная графика. Часть 1. Проекционное черчение. М.: ВЗИИТ, 1993.
2. Федоренков В.А., Шошин А.И. Справочник по машиностроительному черчению. Л.: Машиностроение, 1984.
3. Полозов В.С. Начертательная геометрия: Тексты лекций. М.: ВЗИИТ. 1995.
4. Бубенников А.В. Начертательная геометрия. М.: Высшая школа, 1985.
5. Курс начертательной геометрии (на базе ЭВМ): Учебник для инж.-техн. Вузов / Тевлин А.М., Иванов Г.С., Нартова Л.Г. и др./ Под редакцией А.М. Тевлина, Высшая школа, 1983.
Составители: доктор технических наук, профессор СИНИЦЫН С.А.,
старший преподаватель ТАРНАЕВА С.А.
– Конец работы –
Используемые теги: вижной, состав, железных, дорог0.069
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Подвижной состав железных дорог
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.151 сек.
Новости и инфо для студентов