Протоколы обмена информацией в распределенных сетях управления, их виды (Физические протоколы RS-232, RS-485).
Протоколы обмена информацией в распределенных сетях управления, их виды (Физические протоколы RS-232, RS-485). - раздел Производство, Задачи автоматизации производственных процессов
Работа Последовательного Интерфейса (Порта) В Синхронном Режи...
Работа последовательного интерфейса (порта) в синхронном режиме связана с определенными недостатками, главным из которых является необходимость тактовой согласованности передающего (ведущего) и принимающего (ведомого) микропроцессоров, что не всегда возможно.
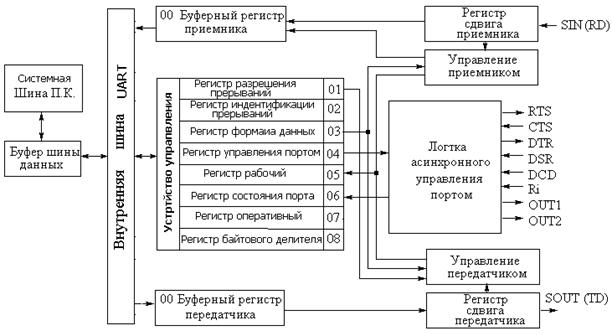
Устранение этого недостатка возможно при использовании асинхронного принципа последовательной передачи данных, суть которого состоит в том, что в процессе передачи данных оба микропроцессорных устройства (ведущий и ведомый) осуществляют взаимопроверку состояния приемопередатчиков. В случае опережения в работе одного из этих микропроцессоров подается команда на прерывание (остановку) его работы или переключение его на другие программные операции до тех пор, пока смежный (медленный) микропроцессор не сравняется с ним по тактовым операциям в процессе передачи данных. В этом режиме оба микропроцессора могут работать на разной тактовой частоте, но обязательно с взаимопроверкой согласованности результата. Структура асинхронного, программируемого, последовательного интерфейса (порта) типа UART (Универсальный асинхронный ридер-транслятор) показана на рис.24.
Рис.24Структура асинхронного, программируемого, последовательного интерфейса (порта) типа UART.
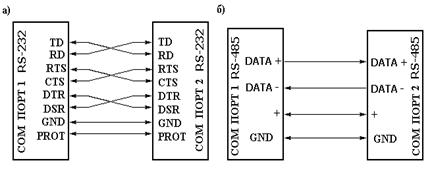
В отличие от структуры последовательного интерфейса (порта), изображенной на рис.22. в этой структуре введено устройство логического управления портом, которое предназначено для контроля согласованности в работе двух смежных, последовательных портов (ведущего и ведомого). К этому устройству подключаются каналы контроля асинхронной связи с входными сигналами: DSR и DTR, RTS и CTS, которые перекрестно соединяются в двух микроконтроллерах по схеме, представленной на рис.25,а.
Устройство управления UART содержит несколько регистров, позволяющих контролировать заполняемость регистров сдвига приемо-передатчика в процессе обмена данных. Если по запросу сигнала DTR будет подучен сигнал DSR нулевого уровня, свидетельствующий о неготовности к работе принимающего (ведомого) порта, то ведущий порт формирует команду OUT1 на прерывание работы своего микропроцессора по передаче данных.
Рис.25. Структура связи двух микропроцессорных систем по асинхронному варианту
Работа этого микропроцессора переключается на выполнение других операций, не связанных передачей данных и возобновляется только тогда, когда принимающий порт будет готов к приему сигнала, т.е. только тогда, когда сигнал DSR достигнет единичного уровня. Данный способ последовательной передачи данных относится к физическому протоколу типа RS-232. Однако существуют и другие типы последовательных портов (интерфейсов) с физическими протоколами такими как: RS-422, RS-485, «токовая петля».
Особенностью физического протокола (интерфейса) RS-485 является то, что для передачи информации по линии связи в последовательном коде для него нужно всего четыре (а иногда и два) провода типа «витая пара». При этом одна из этих пар используется для передачи информации, а другая – для подвода питания к микропроцессорным устройствам, соединенным линией связи. Схема соединения двух микроконтроллеров по интерфейсу RS-485 представлена рис.25,б. Последовательные порты интерфейса RS-485 работают только в асинхронном режиме и оснащаются соответствующей системой UART.
Микропроцессорные системы различных производителей могут связываться между собой через асинхронные, последовательные порты различным образом. Многообразие схем соединения микропроцессорных систем через последовательные порты значительно усложняет задачу их объединения в единую автоматизированную систему. Для успешного решения этой проблемы были разработаны специальные стандарты такого объединения, которые были названы протоколами связи.
Протоколом связи микропроцессорных систем через последовательные порты называется правила и соглашение между этими системами по способу передачи информации через их последовательные порты.
Физический уровень этого протокола определяет количество проводов в шине соединения, способы стыковки шины с последовательным портом, номинальный уровень импульсных сигналов в шине, типы разъемов и кабелей.
Сетевой уровень протокола определяет формат способа передачи данных, алгоритм управления последовательным интерфейсом. К числу современных протоколов последовательной связи относятся: CAN, Profibus, Modbus, Ethernet. Каждый из протоколов характеризуется определенным физическим интерфейсом, который может быть реализован в формате: RS-232, RS-422, RS-485, а также в формате «токовая петля».
Последовательный физический интерфейс RS-232 – это промышленный стандарт для последовательной двунаправленной асинхронной передачи данных
действующей на максимальном расстоянии до 20 м. Вследствие побитовой формы передачи данных по линии связи скорость этой передачи ограничена,
поэтому устройства, обслуживающие последовательные (СОМ) порты по этому виду протокола постоянно контролируют процесс передачи данных. Скорость такой передачи измеряется в бодах (количество бит за 1 сек). Стандартные скорости равны 110, 150, 300, 600, 1200, 2400, 4800, 9600 и 19200 бод. Для передачи по каналу связи нулевого символа напряжение меняется в диапазоне от +3 до +12 В , а для единичного символа это напряжение меняется от – 3 до – 12 В. Приемо–передатчики связаны между собой кабелями со стандартными 25 или 9 штырьковыми разъемами по схеме, представленной на рис.25.
IBM совместимый компьютер может иметь до четырех последовательных (СОМ) портов, выполненных на последовательных интерфейсах по протоколу RS-232.. Девяти штырьковые разъемы СОМ портов RS-232. имеют следующую нумерацию и назначение (Таблтца 12)
Таблица 12
Номер
контакта
Наименование
по стандарту
Направление сигнала
Назначение контакта разъема
DCD
TD
RD
DTR
GND
DSR
RTS
CTS
RI
PROT
Вход
Вход
Выход
Выход
Вход
Выход
Вход
Вход
Обнаружение информационного сигнала
Принимаемые данные
Передаваемые данные
Готовность порта 1 к обмену данными
Заземление по сигналу
Готовность внешнего устройства (порт 2)
Запрос на передачу данных
Порт очищен для передачи
Индикатор звонка
Защитное заземление
Аналогично устроен асинхронный приемопередатчик UART по протоколу RS-485.
Автоматическое управление По способу формирования управляющего воздействия автоматические устройства... Классификация САУ непрерывные и дискретные прямого и непрямого...
Задачи автоматизации производственных процессов.
Автоматизация технологических процессов предполагает решение следующих задач по управлению технологическими процессами:
Автоматическую сигнализацию о состоянии объект
Системы автоматической сигнализации
Системы автоматической сигнализации предназначены для дистанционной передачи информации о состоянии объекта управления. Такая система имеет следующую структуру:
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля уровня одного или нескольких параметров объекта управления. Структура системы автоматического контроля следующая:
Системы автоматической защиты.
Системы автоматической защиты предназначены для поддержания в заданном пределе уровня одного или нескольких параметров объекта управления. Система автоматической защиты имеет следую
Системы автоматического пуска и останова объекта управления.
Эти системы предназначены для автоматического пуска или останова объекта управления. Автоматический пуск или останов объекта управления может осуществляться по сигналам с датчика (и
Системы автоматического регулирования объектов управления.
Системы автоматического регулирования объектов управления предназначены для поддержания заданно характера изменения во времени или от другого аргумента параметров работы объектов уп
Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливаю
Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В это
Структура автоматизированного управления объектом.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим у
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником
Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый матер
Построение графа переходов дискретного состояния автомата.
Для наглядности принципа последовательности функционирования автомата строятся графы, состоящие из системы вершин и ребер направлений. Каждая вершина графа соответствует конкретному
Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурн
Логические схемы алгоритмов.
Функциональная последовательность работы дискретного автомата мажет быть структурно представлена в виде логической блок схемы. Рассмотрим принцип построения таких схем на примере за
Синтез системы автоматического управления водоотливом.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представле
Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцес
Принцип работы микропроцессора при обработке команд
Перед началом работы микропроцессора в его программный счетчик автоматически заносится адрес первой команды программы управления работой микропроцессорной системы. Этот адрес через
Задачи автоматизации выемочных работ
Технологические процессы горного производства связные с его спецификой требуют от систем автоматического управления выполнения следующих задач.
Обеспечение минимальны
Требования к системам автоматизации выемочных работ
Системы автоматического управления технологическим процессом выемки полезного ископаемого должны обеспечивать.
Автоматическую подачу предупредительного звукового сигн
Способы автоматической передвижки призабойной крепи
При автоматической передвижке призабойной крепи применяют два способа этой передвижки:
Способ передвижки секций по принципу «десятков-единиц ». Способ «групповой» передвижки
Способ групповой передвижки секций
При групповой передвижке секций крепи (рис.41б) положительная полярность выходного сигнала блока управления БУ напрямую подключена к соответствующей полярности реле управления всех секций крепи, а
Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом
Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
Запуск каждого конвейера через установленный промежуток времени, который контролируется
Требования к системам автоматизации электровозной откатки.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации долж
Аппаратура НЕРПА. Назначение, структура, принцип работы.
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения
Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахог
Требования к системам автоматизации проветривания шахты
Аппаратура автоматизации управления шахтными вентиляторами должна обеспечивать:
Работу установки в автоматическом режиме без постоянного присутствия обслуживающего персонала;
Особенности технологического процесса при добыче нефти
Связь всех технологических объектов месторождения через единый нефтяной пласт; Недостаток информации о процессах, происходящих в нефтяных пластах; Большая инерционность про
Принцип автоматизации первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Принцип автоматизации ДНС.
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необход
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail







Новости и инфо для студентов