Особенности технологического процесса при добыче нефти - раздел Производство, Задачи автоматизации производственных процессов Связь Всех Технологических Объектов Месторождения Через Единый Нефтяной...
- Связь всех технологических объектов месторождения через единый нефтяной пласт;
- Недостаток информации о процессах, происходящих в нефтяных пластах;
- Большая инерционность происходящих в нефтяном пласте процессов;
- Непостоянство пластового притока нефти или газа на месторождении;
- Непрерывность и однотипность технологического цикла;
- Уникальность условий залегания и состава полезного ископаемого на каждом месторождении.
Для добычи нефти и газа последовательно применяют следующие технологические процессы :
- Бурение скважин для вскрытия продуктивного пласта;
- Транспортировку определенным способом нефти или газа до уровня земной поверхности (технологический процесс добычи);
- Первичную обработку (подготовку) добытого сырья;
- Транспортировку нефти или газа по магистральным трубопроводам к потребителям или на переработку.
Бурение скважин является трудоемким и капиталоемким, но необходимым процессом, без выполнения которого невозможна разведка и вскрытие нефтяных и газовых месторождений. Эффективность процесса бурения скважин во многом зависит от его автоматизации, успешное внедрение которой определяется использованием современных средств автоматики.
Основная трудность автоматизации бурения нефтяных или газовых скважин заключается в том, что информация о происходящих забойных процессах пока может быть получена только косвенным образом с помощью поверхностной аппаратуры, измеряющей реакцию узлов буровой установки на результат протекания этих процессов. Точность замера результата забойных процессов с помощью поверхностной аппаратуры не всегда достаточна для эффективного управления процессом бурения в автоматическом режиме.
 Повысить точность этой аппаратуры можно путем использования сложных алгоритмов, учитывающих одновременно несколько косвенных параметров проявления забойного процесса. Однако это возможно при условии применения в управлении процессом бурения современных вычислительных устройств, в том числе и микропроцессорной техники.
Повысить точность этой аппаратуры можно путем использования сложных алгоритмов, учитывающих одновременно несколько косвенных параметров проявления забойного процесса. Однако это возможно при условии применения в управлении процессом бурения современных вычислительных устройств, в том числе и микропроцессорной техники.
Проходка нефтяных или газовых скважин может выполняться одним из двух возможных способов: роторным или турбинным.
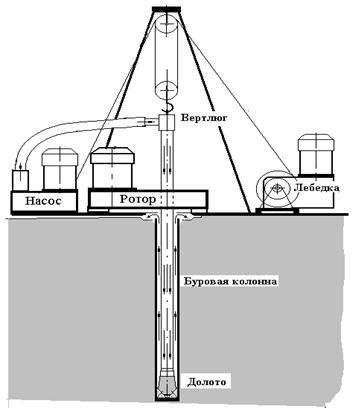
Роторное бурение скважин (рис. 76) применяется на начальном этапе их сооружения, когда они бурятся по относительно слабым и геологически сложным породным горизонтам. При этом способе бурения вращение буровому долоту передается от механизма вращения буровой установки вращением буровой колонны.
Рис. 76. Технологическая схема роторного бурения скважин
Осевое усилие на долото создается частью веса буровой колонны, которая подвешивается с помощью вертлюга и канатной полиспастной системы на буровой вышке. Величина этого усилия регулируется тормозным моментом на барабане буровой лебедки. На этот барабан наматывается канат полиспастной системы подвески буровой колонны. Для удаления продуктов бурения из забойной части скважины во внутреннюю полость буровой колонны подается буровой раствор, плотность которого достаточна для выноса на земную поверхность продуктов разрушения забоя. Этот раствор подается под давлением, которое создается буровым насосом. После выноса на устье скважины продуктов бурения буровой раствор очищается от них, дополнительно обрабатывается и вновь закачивается в скважину. Для того чтобы при бурении стенки скважины не подвергались разрушению, они закрепляются специальными трубами, которые называют обсадными. Эти трубы на всей длине скважины соединяются в обсадную колонну.
Турбинное бурение скважин (рис. 77) применяется при больших глубинах бурения.
Рис. 77. Технологическая схема турбинного бурения скважин
Особенностью технологии турбинного бурения является то, что буровая колонна в этом случае остается неподвижной, а вращение бурового долота обеспечивается специальным устройством, которое называется турбобуром. Турбобур находится в нижней части буровой колонны и с помощью встроенной в его конструкцию системы турбин преобразует давление бурового раствора в момент вращения долота, жестко связанного с этой системой. После выхода из турбобура буровой раствор омывает забой скважины и, как в предыдущем способе бурения, выносит продукты бурения на устье скважины. В остальном эта технология мало отличается от предыдущей.
Разновидностью турбобуров являются электробуры, которые оборудуются асинхронными электродвигателями специальной конструкции, электроэнергия к которым подается по специальному кабелю, расположенному во внутренней полости труб буровой колонны. Момент от этого двигателя через редуктор передается буровому долоту. Сложность этой конструкции состоит в том, что буровой раствор на забой скважины должен проходить через электродвигатель и редуктор.
Все темы данного раздела:
Задачи автоматизации производственных процессов.
Автоматизация технологических процессов предполагает решение следующих задач по управлению технологическими процессами:
Автоматическую сигнализацию о состоянии объект
Системы автоматической сигнализации
Системы автоматической сигнализации предназначены для дистанционной передачи информации о состоянии объекта управления. Такая система имеет следующую структуру:
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля уровня одного или нескольких параметров объекта управления. Структура системы автоматического контроля следующая:
Системы автоматической защиты.
Системы автоматической защиты предназначены для поддержания в заданном пределе уровня одного или нескольких параметров объекта управления. Система автоматической защиты имеет следую
Системы автоматического пуска и останова объекта управления.
Эти системы предназначены для автоматического пуска или останова объекта управления. Автоматический пуск или останов объекта управления может осуществляться по сигналам с датчика (и
Системы автоматического регулирования объектов управления.
Системы автоматического регулирования объектов управления предназначены для поддержания заданно характера изменения во времени или от другого аргумента параметров работы объектов уп
Управление и его виды. Структура ручного управления объектом.
Автоматизация любого процесса всегда связана с управлением этим процессом с помощью воздействия определенных средств на объект управления.
Управление - это целенаправленное
Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливаю
Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В это
Структура устройства автоматического управления, работающего по принципу компенсации отклонения результата управления.
Структура устройства автоматического управления, работающего по принципу компенсации внешнего возмущения на объект управления.
Структура устройства автоматического управления, работающего по принципу компенсации внешнего воздействия на объект управления, представлена на рис. 4. В таких устройствах информаци
Структура автоматизированного управления объектом.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим у
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в
Следящие системы
В следящих системах управляющее воздействие является величиной переменной, но математическое описание управляющего воздействия во времени не может быть установлено, т.к. источником
Системы регулирования по отклонению.
Принцип управления по компенсации отклонения результата управления от заданной величины рассмо
Системы регулирования по возмущению.
Системы автоматического управления, работающие по принципу компенсации внешнего возмущения, при
Характеристика дискретного автомата.
Дискретный автомат – это абстрактное управляющее устройство дискретного действия с некоторой постоянной структурой. Наглядно дискретный автомат можно представить как некоторый матер
Разновидности таблиц состояний дискретных автоматов.
Таблица переходов (функция δ)
Внутренне состояние дискретного автомата в конкретный момент времени описывается табличной функцией, смысловое с
Построение графа переходов дискретного состояния автомата.
Для наглядности принципа последовательности функционирования автомата строятся графы, состоящие из системы вершин и ребер направлений. Каждая вершина графа соответствует конкретному
Граф-схемы алгоритмов
Последовательность функционирования дискретного автомата мажет быть представлена в виде структурного алгоритма через его граф схему. Основу граф-схемы алгоритма составляют структурн
Логические схемы алгоритмов.
Функциональная последовательность работы дискретного автомата мажет быть структурно представлена в виде логической блок схемы. Рассмотрим принцип построения таких схем на примере за
Синтез системы автоматического управления водоотливом.
Для структурного синтеза дискретного автомата выберем нижний уровень системы управления шахтного водоотлива. Функциональная структурная схема этой системы представле
Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцес
Принцип работы микропроцессора при обработке команд
Перед началом работы микропроцессора в его программный счетчик автоматически заносится адрес первой команды программы управления работой микропроцессорной системы. Этот адрес через
Принцип работы микропроцессора при обработке цифровых сигналов
Обработка цифровых сигналов производится в арифметико-логическом устройстве микропроцессора. Это устройство может обрабатывать одновременно два цифровых сигнала. Для этой цели по ко
Программируемый параллельный интерфейс. Назначение для САУ, структура, режимы работы.
Программируемый параллельный интерфейс (ППИ) (адаптер параллельной связи) служит для связи микропроцессора с дискретными или аналоговыми объектами, в качестве которых могут быть дат
Программируемый таймер. Назначение для САУ, структура, режимы работы.
Программируемый таймер (ПТ) в микропроцессорных системах применяется для управления объектами в функции времени. Как правило, в микропроцессорных системах эти устройства применяются
Программируемый последовательный интерфейс. Назначение для САУ, его структура, структура кадра формата передачи данных по линии связи.
Обмен информацией в параллельном коде через параллельные порты (интерфейсы) может быть успешно осуществлен только внутри микропроцессорной системы. Обмен информацией между микропроц
Микроконтроллеры и принципы их объединения в распределенные сети управления объектами.
В течение многих лет системы управления строились по централизованному типу, в котором имелось одно мощное управляющее вычислительное устройство со связью с объектами и огромное кол
Протоколы обмена информацией в распределенных сетях управления, их виды (Физические протоколы RS-232, RS-485).
Работа последовательного интерфейса (порта) в синхронном режиме связана с определенными недостатками, главным из которых является необходимость тактовой согласованности передающего
Задачи автоматизации выемочных работ
Технологические процессы горного производства связные с его спецификой требуют от систем автоматического управления выполнения следующих задач.
Обеспечение минимальны
Требования к системам автоматизации выемочных работ
Системы автоматического управления технологическим процессом выемки полезного ископаемого должны обеспечивать.
Автоматическую подачу предупредительного звукового сигн
Структура и принцип работы регулятора САДУ-2.
Импульсный пропорциональный регулятор ИПИР-3М. Структура, работа.
Аппаратура ИПИР-3М это импульсный пропорционально-интегральный регулятор нагрузки на приводе выемочной машины. Она выпускается серийно в аналоговом варианте. Структура этого устройс
Требования к системам автоматизации передвижки призабойной крепи. Способы и принципы их автоматической поддержки.
Системы автоматической передвижки призабойной крепи должны обеспечивать:
Автоматическую последовательную или шахматном порядке передвижку секций крепи с отставанием в
Способы автоматической передвижки призабойной крепи
При автоматической передвижке призабойной крепи применяют два способа этой передвижки:
Способ передвижки секций по принципу «десятков-единиц ». Способ «групповой» передвижки
Способ групповой передвижки секций
При групповой передвижке секций крепи (рис.41б) положительная полярность выходного сигнала блока управления БУ напрямую подключена к соответствующей полярности реле управления всех секций крепи, а
Требования к системам автоматизации проходческих комбайнов
Системы автоматического управления работой проходческих комбайнов должны обеспечивать:
Автоматическое поддержание нагрузки на режущем органе проходческой машины.
Автоматизация управления траекторией движения рабочего органа проходческого комбайна.
Проходка горных выработок по слабым горным породам выполняется проходческими комбайнами с различным типом исполнительных органов. Эти исполнительные органы могут быть стреловыми и б
Автоматическое вождение проходческого комбайна в заданном направлении по лазерному лучу.
Принцип автоматического вождения проходческого комбайна по лазерному лучу показан на рис. 48а. Согласно этого принципа, источник лазерного излучения 1 подвешивается в верхней части
Автоматическое вождение проходческого комбайна в заданном направлении по гирокомпасу.
Гирокомпасом называют прибор, предназначенный для измерения углового положения каких либо объектов. В наше случае этим прибором можно замерять угловое отклонение траектории движения
Принцип автоматизации машин для обуривания забоя. Требования к системам автоматизации буровых машин.
Процесс проведения горных выработок буровзрывным способом состоит из нескольких операций таких как:
обуривание забоя в соответствии с паспортом бурения шпуров;
Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом
Принцип автоматизации установки буровых машин для обуривания забоя. Алгоритм управления роботом-манипулятором.
Требования к системам автоматизации шахтных конвейерных линий.
В соответствии с технологией транспортировки полезного ископаемого конвейерным транспортом по шахтным выработкам шахтные конвейеры делятся на:
Стационарные;
Требования к системам автоматизации конвейерного транспорта.
Системы автоматического пралния конвейерными линиями должны обеспечивать:
Обеспечение возможности управлении конвейерами в конвейерной линии с центрального пульта упр
Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
Запуск каждого конвейера через установленный промежуток времени, который контролируется
Требования к системам автоматизации электровозной откатки.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации долж
Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта
Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
1.Автоматическое переключение зеленого сигнала светофор
Аппаратура НЕРПА. Назначение, структура, принцип работы.
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения
Требования к системам автоматизации шахтных подъемных установок.
Транспортировка полезного ископаемого из забоя по подземным шахтным выработкам к рудничному стволу выполняться конвейерным и рельсовым транспортом до подземного шахтного бункера. По
Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахог
Принцип автоматического контроля скорости подъемного сосуда шахтных подъемных установок с помощью ЭОС-2.
Автоматическое включение предохранительного торможения должно происходить в случаях, описанных выше приведенными требованиями. В частности это должно произойти, если скорость движен
Требования к системам автоматизации шахтных водоотливных устан.
Шахтные водоотливные установки предназначены для откачки на дневную поверхность воды, которая просачивается в шахтные выработки из вышележащих, естественных водонесущих породных пла
Требования к системам автоматизации шахтного водоотлива
Аппаратура автоматизации шахтного водоотлива должна обеспечивать:
Автоматическую контролируемую заливку насосов перед запуском их в работу; Автоматическое вк
Требования к системам автоматизации проветривания шахты
Аппаратура автоматизации управления шахтными вентиляторами должна обеспечивать:
Работу установки в автоматическом режиме без постоянного присутствия обслуживающего персонала;
Принцип автоматизации группового контроля дебита нефтяных или газовых скважин
Автоматизированный замер дебита куста нефтяных скважин осуществляется на групповой измерительной установке «Спутник» (рис. 83), которая имеет несколько модификаций.
К кусту
Принцип автоматизации первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Принцип автоматизации ДНС.
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необход







Новости и инфо для студентов