рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Математика
- /
- Вид работы: Лекции
- /
- Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом 13
Реферат Курсовая Конспект
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом 13
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом 13 - Лекция, раздел Математика, Оглавление Раздел I. Теоретическая Механика. 6 Введение. 6...
Оглавление
РАЗДЕЛ I. Теоретическая механика. 6
Введение. 6
ЛЕКЦИЯ 1. 6
Тема 1.1. Основные понятия и аксиомы статики. 6
Понятие о силе и системе сил. 6
Задачи теоретической механики. 6
Аксиомы статики. 7
Связи и реакции связей. 8
Примеры решения задач. 9
ЛЕКЦИЯ 2. 13
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом 13
Плоская система сходящихся сил. 13
Решение задач на равновесие геометрическим способом.. 14
Контрольные вопросы и задания. 16
ЛЕКЦИЯ 3. 16
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей аналитическим способом 16
Проекция силы на ось. 17
Определение равнодействующей системы сил аналитическим способом.. 17
Условия равновесия плоской системы сходящихся сил в аналитической форме. 18
Примеры решения задач. 19
Контрольные вопросы и задания. 25
Практическое занятие №1. Плоская система сходящихся сил. 27
Расчетно-графическая работа №1. Определение равнодействующей плоской системы сходящихся сил аналитическим и геометрическим способами. 28
Задание для самостоятельной работы 1. 30
ЛЕКЦИЯ 4. 35
Тема 1.3. Пара сил и момент силы относительно точки. 35
Пара сил, момент пары сил. 35
Момент силы относительно точки. 36
Примеры решения задач. 36
Контрольные вопросы и задания. 39
ЛЕКЦИЯ 5. 42
Тема 1.4. Плоская система произвольно расположенных сил. 42
Теорема Пуансо о параллельном переносе сил. 42
Приведение к точке плоской системы произвольно расположенных сил. 42
Влияние точки приведения. 43
Частные случаи приведения системы сил к точке. 44
Условие равновесия произвольной плоской системы сил. 44
Примеры решения задач. 45
Контрольные вопросы и задания. 47
ЛЕКЦИЯ 6. 49
Тема 1.4. Балочные системы. Определение реакций опор и моментов защемления. 49
Виды нагрузок и разновидности опор. 49
Примеры решения задач. 50
Контрольные вопросы и задания. 56
Практическое занятие №2. Плоская система произвольно расположенных сил. 57
Расчетно-графическая работа №2. Определение реакций в опорах балочных систем под действием сосредоточенных сил и пар сил. 59
Расчетно-графическая работа №3. Определение величин реакций в опорах балочных систем под действием сосредоточенных и распределенных нагрузок. 61
Задание для самостоятельной работы 2. 64
ЛЕКЦИЯ 7. 67
Тема 1.5. Пространственная система сил. 67
Момент силы относительно оси. 67
Пространственная сходящаяся система сил. 67
Произвольная пространственная система сил. 68
Примеры решения задач. 69
Контрольные вопросы и задания. 73
ЛЕКЦИЯ 8. 75
Тема 1.6. Центр тяжести. 75
Теорема Вариньона. 75
Центр параллельных сил. 77
Сила тяжести. 78
Точка приложения силы тяжести. 78
Определение координат центра тяжести плоских фигур. 79
Примеры решения задач. 80
Контрольные вопросы и задания. 84
Практическое занятие 3. Центр тяжести. 85
Расчетно-графическая работа №4. Определение центра тяжести фигур. 87
Задание для самостоятельной работы 3. 90
ЛЕКЦИЯ 9. 90
Тема 1.7. Основные понятия кинематики. Кинематика точки. 93
Основные кинематические параметры.. 93
Примеры решения задач. 94
Контрольные вопросы и задания. 96
ЛЕКЦИЯ 10. 96
Тема 1.8. Кинематика точки. 96
Анализ видов и кинетических параметров движений. 96
Кинематические графики. 97
Примеры решения задач. 98
Контрольные вопросы и задания. 103
ЛЕКЦИЯ 11. 105
Тема 1.9. Простейшие движения твердого тела. 105
Поступательное движение. 105
Вращательное движение. 105
Частные случаи вращательного движения. 106
Скорости и ускорения точек вращающегося тела. 106
Примеры решения задач. 107
Контрольные вопросы и задания. 113
Практическое занятие №4. Кинематика точки. Простейшие движения твердого тела. 114
Расчетно-графическая работа №5. Определение параметров вращательного движения. 116
ЛЕКЦИЯ 12. 118
Тема 1.10. Сложное движение точки. Сложное движение твердого тела. 118
Основные определения. 118
Плоскопараллельное движение твердого тела. 118
Метод разложения сложного движения на поступательное и вращательное. 119
Метод определения мгновенного центра скоростей. 119
Примеры решения задач. 120
Контрольные вопросы и задания. 126
ЛЕКЦИЯ 13. 127
Тема 1.12. Основные понятия и аксиомы динамики. Понятие о трении. 127
Содержание и задачи динамики. 127
Аксиомы динамики. 127
Понятие о трении. Виды трения. 128
Примеры решения задач. 129
Контрольные вопросы и задания. 132
ЛЕКЦИЯ 14. 132
Тема 1.13. Движение материальной точки. Метод кинетостатики. 132
Свободная и несвободная точки. 132
Сила инерции. 133
Принцип кинетостатики (принцип Даламбера) 133
Примеры решений задач. 134
Контрольные вопросы и задания. 137
ЛЕКЦИЯ 15. 139
Тема 1.14. Работа и мощность. 139
Работа. 139
Примеры решения задач. 140
Контрольные вопросы и задания. 142
ЛЕКЦИЯ 16. 143
Тема 1.14. Работа и мощность. Коэффициент полезного действия. 143
Мощность. 143
Коэффициент полезного действия. 144
Примеры решения задач. 144
Контрольные вопросы и задания. 146
ЛЕКЦИЯ 17. 148
Тема 1.15. Общие теоремы динамики. 148
Теорема об изменении количества движения. 148
Теорема об изменении кинетической энергии. 148
Основы динамики системы материальных точек. 149
Примеры решения задач. 151
Контрольные вопросы и задания. 156
Расчетно-графическая работа №6. Работа и мощность. Общие теоремы динамики. 156
РАЗДЕЛ I. Теоретическая механика
Введение
Техническая механика — комплексная дисциплина. Она включает три раздела: «Теоретическая механика», «Сопротивление материалов», «Детали машин».
«Теоретическая механика» — раздел, в котором излагаются основные законы движения твердых тел и их взаимодействия.
В разделе «Сопротивление материалов» изучаются основы прочности материалов и методы расчетов элементов конструкций на прочность, жесткость и устойчивость под действием внешних сил.
В разделе «Технической механики» «Детали машин» рассматриваются основы конструирования и расчета деталей и сборочных единиц общего назначения.
Дисциплина «Техническая механика» является общепрофессиональной, обеспечивающей базовые знания при усвоении специальных дисциплин, изучаемых в дальнейшем.
ЛЕКЦИЯ 1
Тема 1.1. Основные понятия и аксиомы статики
Понятие о силе и системе сил
Сила — это мера механического взаимодействия материальных тел между собой.
 Взаимодействие характеризуется величиной и направлением, т.е. сила есть величина векторная, характеризующаяся
Взаимодействие характеризуется величиной и направлением, т.е. сила есть величина векторная, характеризующаяся
- точкой приложения (А),
- направлением (линией действия),
- величиной (модулем) (рис. 1.1).
Силу измеряют в ньютонах, 1Н = 1кг • м/с2.
Силы, действующие на тело (или систему тел), делятся на
· внешние и
· внутренние.
Внешние силы бывают
- активные и
- реактивные.
Активные силы вызывают перемещение тела,
Реактивные стремятся противодействовать перемещению тела под действием внешних сил.
Внутренние силы возникают в теле под действием внешних сил.
Совокупность сил, действующих на какое-либо тело, называют системой сил.
Эквивалентная система сил – система сил, действующая так же, как заданная.
Уравновешенной (эквивалентной нулю) системой сил называется такая система, которая, будучи приложенной к телу, не изменяет его состояния.
Систему сил, действующих на тело, можно заменить одной равнодействующей, действующей так, как система сил.
Задачи теоретической механики
Теоретическая механика — наука о механическом движении материальных твердых тел и их взаимодействии. Механическое движение понимается как… Для удобства изучения теоретическую механику подразделяют на статику,… · Статика изучает условия равновесия тел под действием сил.Аксиомы статики
В результате обобщения человеческого опыта были установлены общие закономерности механического движения, выраженные в виде законов и теорем. Все… Первая аксиома. Под действием уравновешенной системы сил абсолютно твердое… Вторая аксиома. Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются (рис.…Связи и реакции связей
Все законы и теоремы статики справедливы для свободного твердого тела.
Все тела делятся на свободные и связанные.
Свободные тела — тела, перемещение которых не ограничено.
Связанные тела — тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей.
Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Все связи можно разделить на несколько типов. Связь — гладкая опора (без трения). Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре…Жесткий стержень.
На схемах стержни изображают толстой сплошной линией (рис. 1.9).
Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня.
Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент наложенными на него связями.
Убираем стержень 1, в этом случае стержень 2 падает вниз. Следовательно, сила от стержня 1 (реакция) направлена вверх. Убираем стержень 2. В этом случае точка А опускается вниз, отодвигаясь от стены. Следовательно, реакция стержня 2 направлена к стене.
Шарнирная опора
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей… Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т.… Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси…Примеры решения задач
Последовательность решения задач:
- Выбрать тело (точку), равновесие которого следует рассматривать.
- Освободить тело (шарнир) от связей и изобразить действующие на него активные силы и реакции отброшенных связей. Причем реакции стержней следует направить от шарнира, так как принято предполагать, что стержни растянуты.
- Выбрать оси координат и составить уравнения равновесия, используя условия равновесия системы сходящихся сил на плоскости ∑Xi = 0; ∑Yi = 0. Выбирая оси координат, следует учитывать, что полученные уравнения будут решаться проще, если одну из осей направить перпендикулярно одной из неизвестных сил.
- Определить реакции стержней из решения указанной системы уравнений.
- Проверить правильность полученных результатов, решив уравнения равновесия относительно заново выбранных координат х и у.
Пример 1. Груз подвешен на стержнях и канатах и находится в равновесии (рис. 1.13). Изобразить систему сил, действующих на шарнир А.
Решение
2. Для определения точного направления усилий в стержнях мысленно убираем последовательно стержни 1 и 2. Анализируем возможные перемещения точки… Неподвижный блок с действующими на него силами не рассматриваем. 3. Убираем стержень 1, точка А поднимается и отходит от стены, следовательно, реакция стержня 1 направлена к стене. …Решение
2. Реакция гладкой опоры (стенки) — по нормали от поверхности опоры.Решение
Рассмотрим равновесие системы: стержень CD и блок К с прилегающим к нему отрезком каната ML. Отбросим связи и заменим их действие соответствующими…Решение
2. Освобождаем шарнир В от связей и изображаем действующие на него активные силы и реакции связей (рис. б). 3. Выбираем систему координат, совместив ось у по направлению С реакцией R2…Контрольные вопросы и задания
1. Какая из приведенных систем сил (рис. 1.15) уравновешена?
 |
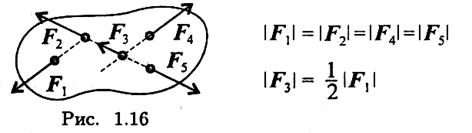 |
2. Какие силы системы (рис. 1.16) можно убрать, не нарушая механического состояния тела:
 |
3. Тела 1 и 2 (рис. 1.17) находятся в равновесии. Можно ли убрать действующие системы сил, если тела абсолютно твердые? Что изменится, если тела реальные, деформируемые?
4. Укажите возможное направление реакций в опорах (рис. 1.18).

ЛЕКЦИЯ 2
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом
Знать геометрический способ определения равнодействующей системы сил, условия равновесия плоской системы сходящихся сил.
Уметь определять равнодействующую, решать задачи на равновесие в геометрической форме.
Плоская система сходящихся сил
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся (рис. 2.1).
Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3;... ...; Fn), п — число сил, входящих в систему.
По следствию из аксиом статики, все силы системы можно переместить вдоль линии действия, и все силы окажутся приложенными в одной точке.
Равнодействующая сходящихся сил.
Используя свойства векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в… При графическом способе определения равнодействующей век- торы сил можно… Вектор равнодействующей направлен навстречу векторам сил слагаемых. Такой способ получения равнодействующей называют…Если плоская система сходящихся сил находится в равновесии, многоугольник сил этой системы должен быть замкнут.
 Если в системе три силы, образуется треугольник сил.
Если в системе три силы, образуется треугольник сил.
Сравните два треугольника сил (рис. 2.4) и сделайте вывод о количестве сил, входящих в каждую систему.
Рекомендация. Обратить внимание на направление векторов.
Решение задач на равновесие геометрическим способом
Геометрическим способом удобно пользоваться, если в системе три силы. При решении задач на равновесие тело считать абсолютно твердым… Порядок решения задач: 1. Определить возможное направление реакций связей.Контрольные вопросы и задания
 |
1. По изображенным многоугольникам сил (рис. 2.7) решите, сколько сил входит в каждую систему и какая из них уравновешена. (Обратить внимание на направление векторов.)
 |
2. Из представленных силовых треугольников выберете треугольник, построенный для точки А (рис. 2.8, 2.9).
4.
 |
Шар подвешен на нити и находится в равновесии. Обратить внимание на направление реакции от гладкой опоры и условие равновесия шара (рис. 2.8).
5. Груз F подвешен на канате и находится в равновесии. Обратить внимание на реакции, приложенные к точке А. Силы, не приложенные к точке А, не рассматриваются. Не забывать об условии равновесия системы сил (рис. 2.9).
ЛЕКЦИЯ 3
Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей аналитическим способом
Знать аналитический способ определения равнодействующей силы, условия равновесия плоской сходящейся системы сил в аналитической форме.
Уметь определять проекции силы на две взаимно перпендикулярные оси, решать задачи на равновесие в аналитической форме.
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).Определение равнодействующей системы сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим пропорции всех заданных векторов на эти… Складываем проекции всех векторов на оси х и у (рис. 3.4, б).Условия равновесия плоской системы сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим: Условия равновесия в аналитической форме можно сформулировать следующим… Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую…Примеры решения задач
Пример 1. Определить величины и знаки проекций представленных на рис. 3.6 сил.
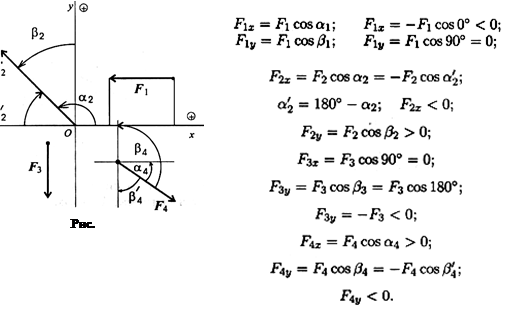 |
Решение
Пример 2. Определить величину и направление равнодействующей плоской системы сходящихся сил аналитическим способом.
Решение
Сложив алгебраически проекции, получим проекцию равнодействующей на ось Ох. …F∑x = 8,66 – 20 + 10,6 = - 0,735 кН
Знак говорит о том, что равнодействующая направлен влево.
2.
 |
Определяем проекции всех сил на ось Оу значения проекций, получим величину проекции Оу.
Сложив алгебраически значения проекций, получим величину проекции равнодействующей на ось Оу.
 |
Знак проекции соответствует направлению вниз. Следовательно, равнодействующая направлена влево и вниз (рис. 3.7б).
3. Определяем модуль равнодействующей по величинам проекций:
 |
 |
4. Определяем значение угла равнодействующей с осью Ох:
 |
и значение угла с осью Оу:
Пример 3. Система трех сил находится в равновесии. Известны проекции двух сил системы на взаимно перпендикулярные оси Ох и )у:
Flx = 10 кН; F2x = 5 кН;
F1y = - 2 кН; F2y = 6 кН.
Определить, чему равна и как направлена третья сила системы.
Решение
1. Из уравнений равновесия системы определяем: 2. По полученным величинам проекций… Направление вектора силы относительно оси Ох (рис. 3.8):Решение
2. Приложим к точке 0 активную силу, которой является собственный вес тела G. Направим ее вниз (рис. б). 3. Мысленно отбросим связи — плоскость и нить. Заменим их действие на точку 0 реакциями связей. Реакция плоскости…Решение
2. Активной силой является вес груза G, направленный вниз (рис. б). 3. Отбросим связи: стержень и нить. Усилие в нити обозначим Sx и направим от… Выполним на отдельном чертеже схему действия сил в точке А (рис. в).Решение
Освободим узел А от связей, заменим их действие искомыми реакциями NАС, NAB(рис. в). Получили плоскую систему сходящихся сил. Выбираем систему координат (рис. г). Сила NAB перпендикулярна оси v, сила NАС — оси и; поэтому в каждое уравнение равновесия войдет лишь одна неизвестная…Решение
Силы, действующие на груз А, представляют собой плоскую систему сходящихся сил. NBC — реакция наклонной плоскости.
Если груз А находится в покое, то ∑Pto = 0, т.е.

Контрольные вопросы и задания

1. Запишите выражение для расчета проекции силы F на ось Оу (рис. 3.9).
2. Определите сумму проекций сил системы на ось Ох (рис. 3.10).
4. Определите величину силы по известным проекциям:
Fx = 3 кН; Fy = 4 кН.
5.
 |
 Груз находится в равновесии (рис. 3.11). Какая система уравнений равновесия для шарнира А записана верно?
Груз находится в равновесии (рис. 3.11). Какая система уравнений равновесия для шарнира А записана верно?
Указания.
2. При ответе на вопрос 4 сначала следует определить возможные направления реакций в стержнях, мысленно убирая по очереди стержни и рассматривая… Затем записать алгебраические суммы проекций сил на оси Ох и Оу. Полученные…Тема 1.2. Статика. Проекции силы на ось
 |
Практическое занятие №1. Плоская система сходящихся сил
Знать способы сложения двух сил и разложение силы на составляющие, геометрический и аналитический способы определения равнодействующей силы, условия равновесия плоской сходящейся системы сил.
Уметь определять равнодействующую системы сил, решать задачи на равновесие геометрическим и аналитическим способом, рационально выбирая координатные оси.
Расчетные формулы
где F∑x, F∑y — проекции равнодействующей на оси координат; Fkx,…Пример 1. Определение равнодействующей системы сил.
Определить равнодействующую плоской системы сходящихся сил аналитическим и геометрическим способами (рис. П1.1). Дано:


Решение
2. Определить равнодействующую графическим способом.Расчетно-графическая работа №1. Определение равнодействующей плоской системы сходящихся сил аналитическим и геометрическим способами
 |
Задание 1. Используя схему рис. П1.1а, определить равнодействующую системы сил геометрическим способом
Пример 2. Решение задачи на равновесие аналитическим способом.
Грузы подвешены на стержнях и канатах и находятся в равновесии. Определить реакции стержней АВ и СВ (рис. П1.2).
Решение
1. Определяем вероятные направления реакций (рис. П1.2а). Мысленно убираем стержень АВ, при этом стержень СВ опускается, следовательно, точка В… Если убрать стержень СВ, точка В опустится, следовательно, стержень СВ… 2. Освобождаем точку В от связи (рис. П1.26).Темы 1.1, 1.2. Статика. Плоская сходящаяся система сил
Задача 1
 |
 |
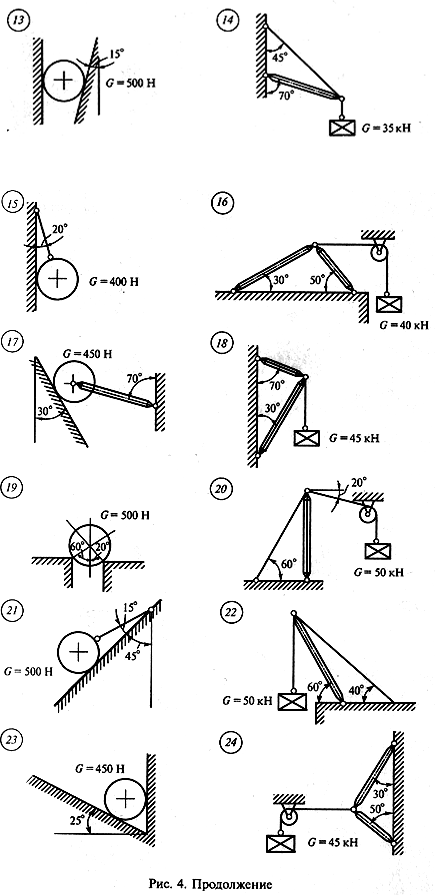
Задача 2. Определить реакции стержней, удерживающих грузы F1 и F2. Массой стержней пренебречь. Схему своего варианта см. на рисунке. Числовые данные своего варианта взять из таблицы.
 |
ЛЕКЦИЯ 4
Тема 1.3. Пара сил и момент силы относительно точки
 Знать обозначение, модуль и определение моментов пары сил или относительно точки, условия равновесия системы пар сил.
Знать обозначение, модуль и определение моментов пары сил или относительно точки, условия равновесия системы пар сил.
Уметь определять моменты пар сил и момент силы относительно точки, определять момент результирующей пары сил.
Пара сил, момент пары сил
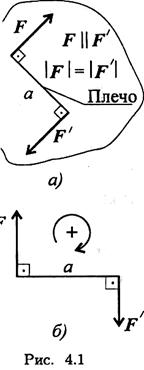
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны.
Рассмотрим систему сил (F, F1), образующих пару. Пара сил вызывает вращение тела, и ее действие на тело оценивается моментом. Силы,… Свойства пар (без доказательств): Пару сил можно перемещать в плоскости… Момент равнодействующей пары равен алгебраической сумме моментов пар, составляющих…Момент силы относительно точки
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается моментом.
 Момент силы относительно точки численно равен произведению модуля силы на расстояние от точки до линий действия силы.
Момент силы относительно точки численно равен произведению модуля силы на расстояние от точки до линий действия силы.
Перпендикуляр, опущенный из точки на линию действия силы (рис. 4.4), называется плечом силы.
Обозначение момента Mo(F) или mО(F);
MО(F) = Fa.
Единица измерения [mО(F)] = Н*м.
Момент считается положительным, если сила разворачивает тело по часовой стрелке.
Примечание. В разных учебных пособиях знак момента назначается по-разному.
Момент силы относительно точки равен нулю, если линия действия силы проходит через точку, т. к. в этом случае расстояние от точки до силы равно нулю.
Примеры решения задач
Пример 1. Дана пара сил |F1| = F11 =42 кН; плечо2 м. Заменить заданную пару сил эквивалентной парой с плечом 0,7 м (рис. 4.5).
Решение

Пары сил эквивалентны, если моменты этих пар численно равны:
Пример 2. Дана система пар сил (рис.4.6). Определить момент результирующей пары.
Решение
Подставив численные значения, получим: m1 = 10 • 0,2 = 2кН*м;Решение
2. Исходя из выбранного направления сил пары (RA, Rв), её момент Мо = - RA *АВ… 3. Составим уравнение равновесия пар сил:Пример 6. Определить опорные реакции балки, показанной на рис. 1.14, а.
Решение
Выбираем систему координат (см. рис. 1.14,6). Составляем три уравненияравновесия:Решение
Освобождаем раму от связей и заменяем их действие реакциями НА, Нв и VA. Действующие на раму нагрузки и искомые… Искомые реакции получились положительными; это указывает на то, что предварительно выбранные направления реакций…Контрольные вопросы и задания
1. Какие силы из системы сил (рис. 4.8) образуют пары?
F1=F2 = F4; F3 = F6; F5 = 0,9F6.
2.
 |
Определите момент изображенной на рис. 4.9 пары сил. F = F' = 5кН.
3. Какие из изображенных пар (рис. 4.10) эквивалентны, если
 F1 = F2 = 8 кН; F3 = 6,4 кН; а1 = 2 м; а2 = 2,5 м?
F1 = F2 = 8 кН; F3 = 6,4 кН; а1 = 2 м; а2 = 2,5 м?
4. Какую силу необходимо приложить в точке с (рис. 4.11), чтобы алгебраическая сумма моментов относительно точки О была равна нулю?
OA = АВ = ВС = 5 м; F1 = 7,8кН; F2 = 3 кН.
5. Ответьте на вопросы тестового задания.
 |
Тема 1.3. Статика
ЛЕКЦИЯ 5
Тема 1.4. Плоская система произвольно расположенных сил
Иметь представление о главном векторе, главном моменте, равнодействующей плоской системы произвольно расположенных сил.
Знать теорему Пуансо о приведении силы к точке, приведение произвольной плоской системы сил к точке, три формы уравнений равновесия.
Уметь заменять произвольную плоскую систему сил одной силой и одной парой.
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению…Приведение к точке плоской системы произвольно расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить. Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения. Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
Появившиеся при переносе пары называют присоединенными парами.
Переносим все силы в точку О. Получим пучок сил в точке О, который можно… Образующуюся систему пар сил можно заменить одной эквивалентной парой — главным…Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится, т. к. меняются расстояния от векторов-сил до новой точки приведения.
С помощью теоремы Вариньона о моменте равнодействующей можно определить точку на плоскости, относительно которой главный момент равен нулю.
Тогда произвольная плоская система сил может быть заменена одной силой. Эту силу называют равнодействующей системы сил.
Численно равнодействующая равна главному вектору системы сил, но приложена в другой точке, относительно которой главный момент равен нулю.… Численно ее значение определяется так же, как главный вектор системы сил:Частные случаи приведения системы сил к точке
При приведении системы сил к точке возможны следующие варианты:

Условие равновесия произвольной плоской системы сил
1. При равновесии главный вектор системы равен нулю (Fгл = 0). Аналитическое определение главного вектора приводит к выводу:Для того чтобы твердое тело под действием произвольной плоской системы сил находилось в равновесии, необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил системы на любую ось относительно любой точки в плоскости действия сил равнялась нулю.
Получим основную форму уравнения равновесия:

Теоретически уравнений моментов можно записать бесконечное множество, но практически доказано, что на плоскости можно составить только три независимых уравнения моментов и при этом три точки (центры моментов) не должны лежать на одной линии.
Таким образом, имеем пять независимых уравнений равновесия.
Для разных случаев используются три группы уравнений равновесия.Примеры решения задач
 Пример 1. Найти момент присоединенной пары при переносе силы F3 в точку В (рис. 5.3). F1 = 10кН; F2 = 15кН; F3 = 18кН; а = 0,2 м.
Пример 1. Найти момент присоединенной пары при переносе силы F3 в точку В (рис. 5.3). F1 = 10кН; F2 = 15кН; F3 = 18кН; а = 0,2 м.
Решение
Используем теорему Пуансо.
MB(F3) = 18 • 0,2 = 3,6 кН*м.
Пример 2. Найти главный вектор системы (рис. 5.4). F1 = 10кН; F2 = 16кН; F3= 12кН; т = 60кН-м.
Решение
Главный вектор равен геометрической сумме сил:
 |
Пример 3. Найти главный момент системы относительно точки В (использовать данные примера 2).
Решение
Главный момент равен алгебраической сумме моментов сил относительно точки приведения:

Пример 4. К телу приложена уравновешенная система сил (рис. 5.5). Две из них неизвестны. Определить неизвестные силы.
F1 = 10кН; F2 = 16 кН.
Решение
Наносим оси координат и используем уравнения равновесия: Пример 5. К двум точкам тела приложены четыре силы F1 = F2 = F3 = F4 = 5 Н,…Решение
1. Центр приведения (точка А) задан. Поэтому примем точку А за начало координат и проведем ось х вдоль отрезка АВ, а ось у — по линии действия… 2. Определим проекции сил на ось х: F1x=0', F2x=F2=5 Н; F3X= — Fssin 30° = 5 sin 30° = —2,5 Н; F4X = — F4sin 60° = — 5…Контрольные вопросы и задания
1. Чему равен главный вектор системы сил?
2. Чему равен главный момент системы сил при приведении ее к точке?
3. Чем отличается главный вектор от равнодействующей плоской системы произвольно расположенных сил?
Выбрать из предложенных ответов:
· величиной;
· направлением;
· величиной и направлением;
· точкой приложения;
· ничем.
4. Тело движется равномерно и прямолинейно (равновесие). Чему равны главный вектор и главный момент системы?
5. Тело вращается вокруг неподвижной оси. Чему равны главный вектор и главный момент действующей на него системы сил?
 |
6. Найдите главный вектор и главный момент системы сил, если центр приведения находится в точке А (рис. 5.6).
7. Какое еще уравнение равновесия нужно составить, чтобы убедиться в том, что система сил (рис. 5.7) находится в равновесии?
 |
ЛЕКЦИЯ 6
Тема 1.4. Балочные системы. Определение реакций опор и моментов защемления
Иметь представление о видах опор и возникающих реакциях в опорах.
Знать три формы уравнений равновесия и уметь их использовать для определения реакций в опорах балочных систем.
Уметь выполнять проверку правильности решения.
Виды нагрузок и разновидности опор
Виды нагрузок
По способу приложения нагрузки делятся на
· сосредоточенные и
· распределенные.
Если реально передача нагрузки происходит на пренебрежимо малой площадке (в точке), нагрузку называют сосредоточенной.
Часто нагрузка распределена по значительной площадке или линии (давление воды на плотину, давление снега на крышу и т.п.), тогда нагрузку считают распределенной.
В задачах статики для абсолютно твердых тел распределенную нагрузку можно заменить равнодействующей сосредоточенной силой (рис. 6.1).

q — интенсивность нагрузки; I — длина стержня;
G = ql — равнодействующая распределенной нагрузки.
Разновидности опор балочных систем (см. лекцию 1)
Балка — конструктивная деталь в виде прямого бруса, закрепленная на опорах и изгибаемая приложенными к ней силами.
Высота сечения балки незначительна по сравнению с длиной.
Жесткая заделка (защемление) (рис. 6.2)
 Опора не допускает перемещений и поворотов. Заделку заменяют двумя составляющими силы Rax и и парой с моментом Mr.
Опора не допускает перемещений и поворотов. Заделку заменяют двумя составляющими силы Rax и и парой с моментом Mr.
Для определения этих неизвестных удобно использовать систему уравнений в виде

Каждое уравнение имеет одну неизвестную величину и решается без подстановок.
Для контроля правильности решений используют дополнительное уравнение моментов относительно любой точки на балке, например


Шарнирно-подвижная опора (рис. 6.3)
Опора допускает поворот вокруг шарнира и перемещение вдоль опорной поверхности. Реакция направлена перпендикулярно опорной поверхности.
Шарнирно-неподвижная опора (рис. 6.4)
Опора допускает поворот вокруг шарнира и может быть заменена двумя составляющими силы вдоль осей координат.
Балка на двух шарнирных опорах (рис. 6.5)
 |
Не известны три силы, две из них — вертикальные, следовательно, удобнее для определения неизвестных использовать систему уравнений во второй форме:

Составляются уравнения моментов относительно точек крепления балки. Поскольку момент силы, проходящей через точку крепления, равен 0, в уравнении останется одна неизвестная сила.

Для контроля правильности решения используется дополнительное уравнение

При равновесии твердого тела, где можно выбрать три точки, не лежащие на одной прямой, удобно использовать систему уравнений в третьей форме (рис. 6.6):

Примеры решения задач
Пример 1. Одноопорная (защемленная) балка нагружена сосредоточенными силами и парой сил (рис. 6.7). Определить реакции заделки.
 |
Решение
2. В заделке может возникнуть реакция, представляемая двум: составляющими (RAy, RAx), и реактивный момент МA. Наносим на схему балки возможные направления реакций.
Замечание. Если направления выбраны неверно, при расчетах получим отрицательные значения реакций. В этом случае реакции на схеме следует направить в противоположную сторону, не повторяя расчета.
В силу малой высоты считают, что все точки балки находятся на одной прямой; все три неизвестные реакции приложены в одной точке. Для решения удобно использовать систему уравнений равновесия в первой форме. Каждое уравнение будет содержать одну неизвестную.
3. Используем систему уравнений:

Знаки полученных реакций (+), следовательно, направления реакций выбраны верно.
3. Для проверки правильности решения составляем уравнение моментов относительно точки В.

Подставляем значения полученных реакций:

Решение выполнено верно.
Пример 2. Двухопорная балка с шарнирными опорами А и В нагружена сосредоточенной силой F, распределенной нагрузкой с интенсивностью q и парой сил с моментом т (рис. 6.8а). Определить реакции опор.
 |
Решение
1. Левая опора (точка А) — подвижный шарнир, здесь реакция направлена перпендикулярно опорной поверхности. Правая опора (точка В) — неподвижный шарнир, здесь наносим две составляющие… 2. Поскольку на схеме возникнут две неизвестные вертикальные реакции, использовать первую форму уравнений равновесия…Решение
Рассмотрим равновесие балки АВ. Отбросим опорное закрепление (заделку) и заменим его действие реакциями НА,VA и тА (рис. 1.17, б). Получили… Выбираем систему координат (рис. 1.17,6) и составляем уравнения равновесия: …Решение
Рассматриваем равновесие балки АВ. Отбрасываем опорные закрепления и заменяем их действие реакциями (рис. 1.18,6). Получили плоскую систему… Выбираем систему координат (см. рис. 1.18,6) и составляем уравнения…Решение
Рассмотрим равновесие балки AB, к которой приложены как заданные, так и искомые силы. На балку действуют равномерно распределенная нагрузка интенсивностью q, сила… Освободим балку от связей и заменим их действие реакциями (рис. 1.19, б). Получили плоскую систему произвольно…Решение
Освобождаем раму от связей и заменяем их действие реакциями NА, VA, VB (рис. 1.20, б). Получили плоскую систему произвольно расположенных сил. Выбираем систему координат (см. рис. 1.20, б) и составляем уравнения…Контрольные вопросы и задания
1. Замените распределенную нагрузку сосредоточенной и определите расстояние от точки приложения равнодействующей до опоры А (рис. 6.9).

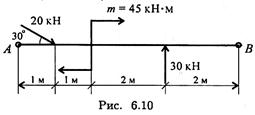
2. Рассчитайте величину суммарного момента сил системы относительно точки А (рис. 6.10).
3. Какую из форм уравнений равновесия целесообразно использовать при определении реакций в заделке?
4. Какую форму системы уравнений равновесия целесообразно использовать при определении реакций в опорах двухопорной балки и почему?
 |
5. Определите реактивный момент в заделке одноопорной балки, изображенной на схеме (рис. 6.11).
6. Определите вертикальную реакцию в заделке для балки, представленной на рис. 6.11.
Практическое занятие №2. Плоская система произвольно расположенных сил
Знать теорему Пуансо о приведении силы к точке.
Уметь приводить произвольную плоскую систему сил к точке, определяя величины главного вектора и главного момента системы.
Знать три формы уравнений равновесия и уметь ими пользоваться при определении реакций в опорах балочных систем.
Основные формулы и предпосылки расчета
Виды опор балок и их реакции (рис. П2.1) Моменты пары сил и силы относительно точки (рис. П2.2)Упражнения при подготовке к самостоятельной работе
F = 20кН; АВ = 6м; ВС = 2м.Расчетно-графическая работа №2. Определение реакций в опорах балочных систем под действием сосредоточенных сил и пар сил
Задание 1. Определить величины реакций в опоре защемленной балки. Провести проверку правильности решения.

 |
 |

Расчетно-графическая работа №3. Определение величин реакций в опорах балочных систем под действием сосредоточенных и распределенных нагрузок
Задание 1. Определить величины реакций в заделке. Провести проверку правильности решения.

Задание 2. Определить величины реакций в шарнирных опорах балки. Провести проверку правильности решения.


При защите работ ответить на вопросы карт с тестовыми заданиями.
Тема 1.4. Статика. Произвольная плоская система сил
 |
Задание для самостоятельной работы 2.
Определить опорные реакции балки на двух опорах по данным одного из вариантов, показанных на схемах. Проверить правильность их определения.
 |

 |

ЛЕКЦИЯ 7
Тема 1.5. Пространственная система сил
Знать момент силы относительно оси, свойства момента, аналитический способ определения равнодействующей, условия равновесия пространственной системы сил.
Уметь выполнять разложение силы на три взаимно перпендикулярные оси, определять момент силы относительно оси.
Пространственная система сил — система сил, линии действия которых не лежат в одной плоскости.
Момент силы относительно оси
а — расстояние от оси до проекции np F — проекция силы на плоскость, перпендикулярную оси ОО.Пространственная сходящаяся система сил
Вектор в пространстве
Модуль вектора может быть получен из зависимости гдеПространственная сходящаяся система сил
Пространственная сходящаяся система сил — система сил, не лежащих в одной плоскости, линии действия которых пересекаются в одной точке. Равнодействующую пространственной системы сил можно определить, построив…Произвольная пространственная система сил
Приведение произвольной пространственной системы сил к центру О.
Силы необходимо параллельно перемещать, при этом образуется система пар сил. Момент каждой из этих пар равен произведению модуля силы на расстояние… В центре приведения возникает пучок сил, который может быть заменен суммарной… Моменты пар сил можно сложить, получив суммарный момент системы Мгл (главный момент).Уравнения равновесия пространственной системы сил
Шесть уравнений равновесия пространственной системы сил соответствуют шести независимым возможным перемещениям тела в…Примеры решения задач
 Пример 1. На тело в форме куба с ребром а = 10 см действуют три силы (рис. 7.6). Определить моменты сил относительно осей координат, совпадающих с ребрами куба.
Пример 1. На тело в форме куба с ребром а = 10 см действуют три силы (рис. 7.6). Определить моменты сил относительно осей координат, совпадающих с ребрами куба.
Решение
2. Моменты сил относительно оси Оу.Решение
2. Определяем реакции в опоре А. На опоре действуют две составляющие реакции (YA; XA).Решение
Опоры вала, изображенные на рис. 1.21, а, надо рассматривать как пространственные шарнирные опоры, препятствующие линейным перемещениям в… Освобождаем вал от связей и заменяем их действие реакциями VВ, НВ,VC, НС (рис.…Решение
Рассматриваем равновесие горизонтального коленчатого вала со шкивом. Прикладываем в соответствии с условием задачи заданные силы Р, S1, S2 и G.… Составим уравнения равновесия:Контрольные вопросы и задания
1. Запишите формулы для расчета главного вектора пространственной системы сходящихся сил.
2. Запишите формулу для расчета главного вектора пространственной системы произвольно расположенных сил.
3. Запишите формулу для расчета главного момента пространственной системы сил.
4. Запишите систему уравнений равновесия пространственной системы сил.
5. Какое из уравнений равновесия нужно использовать для определения реакции стержня R1 (рис. 7.8)?

6. Определите главный момент системы сил (рис. 7.9). Точка приведения — начало координат. Координатные оси совпадают с ребрами куба, ребро куба равно 20 см; F1 — 20кН; F2 — 30кН.
7. Определите реакцию Хв (рис. 7.10). Вертикальная ось со шкивом нагружена двумя горизонтальными силами. Силы F1 и F2 параллельны оси Ох. АО = 0,3 м; ОВ = 0,5 м; F1 = 2кН; F2 = 3,5 кН.
 |
Рекомендация. Составить уравнение моментов относительно оси Оу' в точке А.
8. Ответьте на вопросы тестового задания.
Тема 1.5. Статика. Пространственная система сил
 |
ЛЕКЦИЯ 8
Тема 1.6. Центр тяжести
Иметь представление о системе параллельных сил и центре системы параллельных сил, о силе тяжести и центре тяжести.
Знать методы для определения центра тяжести тела и формулы для определения положения центра тяжести плоских фигур.
Уметь определять положение центра тяжести простых геометрических фигур, составленных из стандартных профилей.
Теорема Вариньона
Мгл = ΣFkl, где ΣFk - сумма перенесённых сил; l – расстояние от линии действия сил до точки приведения (плечи сил).Решение
Но если ось х расположить перпендикулярно силам, а ось у — параллельно (рис.…Центр параллельных сил
Зная правила сложения двух параллельных сил, нетрудно путем последовательного сложения найти равнодействующую и для любой системы параллельных… Пусть, например, к телу приложены в точках B1, В2 и В3 три параллельные и… Модуль равнодействующей равен сумме модулей составляющих сил;Точка С носит название центра системы параллельных сил.
Из сказанного выше следует, что центром данной системы параллельных сил называется точка, через которую проходит линия действия их равнодействующей… Выведем теперь формулы для определения координат центра системы параллельных… Координаты центра параллельных сил С обозначим хС, уС , zС.Сила тяжести
Сила тяжести — равнодействующая сил притяжения к Земле, распределенных по всему объему тела. Силы притяжения, приложенные к частицам твердого тела, образуют систему сил, линии действия которых сходятся в центре Земли (рис. 8.1). Поскольку радиус Земли значительно больше размеров любого земного тела, силы притяжения можно считать параллельными.
Точка приложения силы тяжести
Если в формулахкоординат центра параллельных сил модули сил Fк заменим модулями сил тяжести Gh, то получим формулы координат центра тяжести тела:

Эти формулы используют лишь в тех случаях, когда требуется определить положение центра тяжести неоднородного тела или неизменяемой системы тел из различных материалов. Обычно определяют положения центров тяжести однородных тел и тогда из формул следуют три их разновидности.
- Если тело имеет вид пространственной фигуры, составленной из однородных тонких прутков (т. е. имеет вид решетки или каркаса), то сила тяжести любого прямолинейного или криволинейного участка фигуры
Gh = lhq,
где q — постоянная для всей фигуры сила тяжести единицы длины материала (интенсивность силы тяжести по длине материала фигуры). После подстановки в формулы вместо Gк его значения lhq постоянный множитель q в каждом слагаемом числителя и знаменателя вынесем за знак суммы (за скобки) и сократим. В результате получим формулы координат центров тяжести фигур в виде решетки (каркаса):

где xk, yk, zк — координаты центров тяжести отдельных участков фигуры длиной lк.
- Если тело имеет вид фигуры, составленной из плоских или изогнутых тонких однородных пластин, то сила тяжести каждого участка такой фигуры
Gh=Akp,
где Ak — площадь участка, р — сила тяжести единицы площади фигуры (интенсивность силы тяжести по площади фигуры). Подставив в формулу вместо Gk его значение Ahq, получим формулы координат центра тяжести фигуры, составленной из площадей:

где xk, yk, zк — центры тяжести отдельных участков фигуры площадью А.
- Аналогичные формулы получим и для тел, составленных из объемов, если в формулах заменим Gh = Vhd, где Vh — объемы участков тела, силы тяжести которых Gк, d — постоянная для всего тела сила тяжести единицы объема (интенсивность силы тяжести по объему тела или, иначе, объемная сила тяжести):

Здесь xh, yk, zk — координаты центров тяжести участков тела с объемами Vk. Для плоских фигур из трех формул используют две. Для плоской фигуры, составленной из линий, прутков,

Для плоской фигуры, составленной из площадей,

При решении задач механики используют чаще последние формулы.
Числители в этих формулах, равные алгебраическим суммам произведений площадей частей плоской фигуры на расстояния их центров тяжести до соответствующей оси, называют статическими моментами плоской фигуры относительно осей.
Следовательно, ΣAкxк — статический момент плоской фигуры относительно оси у, ΣAкук — статический момент плоской фигуры относительно оси х.
Обозначив статические моменты соответственно Sy, Sx и приняв во внимание, что ΣАк = А — площади всей плоской фигуры, последние две формулы примут вид

Отсюда

т. е. статический момент плоской фигуры относительно оси абсцисс равен произведению площади фигуры на ординату ее центра тяжести, а статический момент относительно оси ординат — произведению площади фигуры на абсциссу ее центра тяжести.
Статический момент плоской фигуры выражается в м3, см3 или в мм3.
 Пример. Определить статические моменты прямоугольника со сторонами в = 20 см и h = 14 см относительно осей х и у (рис. 1.85, а).
Пример. Определить статические моменты прямоугольника со сторонами в = 20 см и h = 14 см относительно осей х и у (рис. 1.85, а).
Решение
Sx = Ayс = 20 * 14 * 7 = 1960 см3, Sy = Axc = 20 * 14 * 10 = 2800 см3, так как центр тяжести С прямоугольника… Из равенстваСтатический момент плоской фигуры относительно центральной оси равен нулю.
Действительно, если в примере начало осей координат поместить в точке С (рис. 1.85, б), то при любом положении осей х и у каждая из них будет центральной и в этом случае хс=0, ус=0. Значит, Sx = 0, Sy = 0.
Определение координат центра тяжести плоских фигур
Положения центров тяжести простых геометрических фигур могут быть рассчитаны по известным формулам (рис. 8.3: а) — круг; б) — квадрат,… Примечание. Центр тяжести симметричной фигуры находится на оси симметрии.Примеры решения задач
Пример 1. Определить положение центра тяжести фигуры, представленной на рис. 8.4.
Решение
Решение
Так как ферма симметричная, то ее центр тяжести лежит на оси симметрии DF. При выбранной (рис. 116) системе координатных осей абсцисса центра… Неизвестной, следовательно, является лишь ордината уС центра тяжести фермы. Для ее определения разбиваем ферму на…Решение
1 — швеллер № 10 (ГОСТ 8240-89); высота h = 100 мм; ширина полки b = 46 мм; площадь сечения А1 = 10,9 см2; 2 — двутавр № 16 (ГОСТ 8239-89); высота 160 мм; ширина полки 81 мм; площадь… 3 — лист 5x100; толщина 5 мм; ширина 100мм; площадь сечения A3 = 0,5 • 10 = 5 см2.Решение
1. Разобьем сечение на профили проката: два уголка 56 х 4 и швеллер № 18. Обозначим их 1, 2, 3 (см. рис. 8, а). 2. Укажем центры тяжести каждого профиля, используя табл. 1 и 4 прил. I, и… 3. Выберем систему координатных осей. Ось у совместим с осью симметрии, а ось х проведем через центры тяжести…Решение
1. В ненагруженном состоянии у крана возникает опасность опрокидывания при повороте вокруг рельса А. Следовательно, относительно точки А момент… 2. Опрокидывающий момент относительно точки А создается силой тяжести противовеса, т. е.Контрольные вопросы и задания
1. Почему силы притяжения к Земле, действующие на точки тела, можно принять за систему параллельных сил?
2. Запишите формулы для определения положения центра тяжести неоднородных и однородных тел, формулы для определения положения центра тяжести плоских сечений.
3. Повторите формулы для определения положения центра тяжести простых геометрических фигур: прямоугольника, треугольника, трапеции и половины круга.
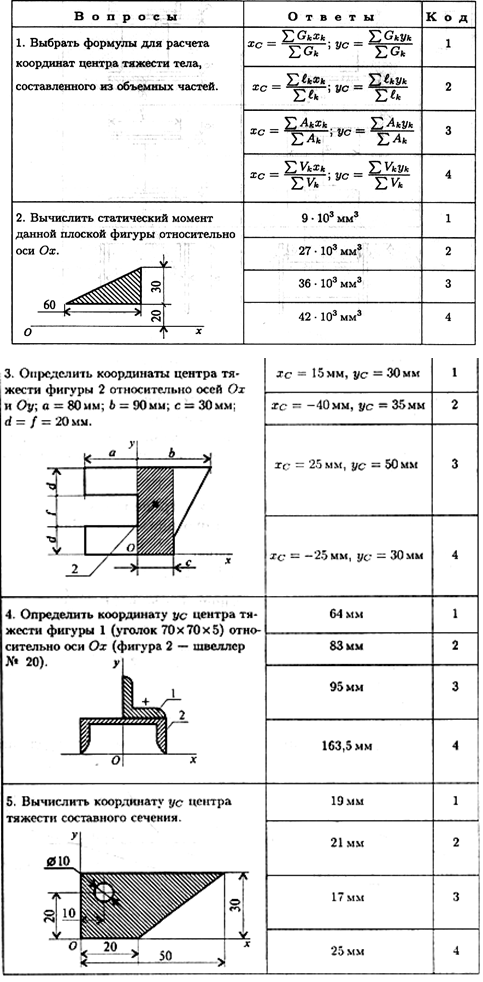
4.  Что называют статическим моментом площади?
Что называют статическим моментом площади?
5. Вычислите статический момент данной фигуры относительно оси Ox. h = 30 см; b = 120 см; с = 10 см (рис. 8.6).
6. Определите координаты центра тяжести заштрихованной фигуры (рис. 8.7). Размеры даны в мм.
7. Определите координату у фигуры 1 составного сечения (рис. 8.8).
При решении воспользоваться справочными данными таблиц ГОСТ «Сталь горячекатанная» (см. Приложение 1).
Практическое занятие 3. Центр тяжести.
Тема 1.6. Центр тяжести
Знать методы определения центра тяжести тела и плоских сечений, формулы для определения положения ЦТ плоских сечений.
Уметь определять положение центра тяжести сложных геометрических фигур, определять положение центра тяжести фигур, составленных из стандартных профилей.
Основные формулы и предпосылки расчета
Упражнения при подготовке к самостоятельной работе
Сколько координат центра тяжести нужно определять расчетным путем для каждого из изображенных сечений…Расчетно-графическая работа №4. Определение центра тяжести фигур.
Тема 1.6. Статика. Центр тяжести тела
 |
Задание для самостоятельной работы 3.
Определить координаты центра тяжести сечения по данным одного из вариантов, показанных на рис. 10. Показать положение центра тяжести на сечении.

 |
 |
ЛЕКЦИЯ 9
Тема 1.7. Основные понятия кинематики. Кинематика точки
Иметь представление о пространстве, времени, траектории, пути, скорости и ускорении.
Знать способы задания движения точки (естественный и координатный).
Знать обозначения, единицы измерения, взаимосвязь кинематических параметров движения, формулы для определения скоростей и ускорений (без вывода).
Кинематика рассматривает движение как перемещение в пространстве. Причины, вызывающие движение, не рассматриваются. Кинематика устанавливает способы задания движения и определяет методы определения кинематических параметров движения.
Основные кинематические параметры
Траектория. Линию, которую очерчивает материальная точка при движении в пространстве, называют траекторией. Траектория может быть прямой и кривой, плоской и пространственной линией. Уравнение траектории при плоском движении: у = f(х).Примеры решения задач
Пример 1. Дано уравнение движения точки: S = 0,36t2 + 0,18t. Определить скорость точки в конце третьей секунды движения и среднюю скорость за первые 3 секунды.
Решение
S' = 2 • 0,36t + 0,18; v = 0,72t + 0,18. 2. Скорость в конце третьей секунды (t = Зс) v3 = 0,72 * 3 + 0,18 = 2,34м/с.Решение
Уравнение скорости: v = dS/dt Скорость будет равна v = 2 * 2,5t + 1,2; v = 5t + 1,2 (м/с). Касательное ускорение: аt = v' = 5 м/с2.Решение
1. Если длина дуги А0А1 равна 1/4 длины окружности, то середина дуги А находится от начала отсчета А0 на расстоянии 1/8 окружности, т, е. 2. Из заданного уравнения движения s = πt2 находим, что точка после начала движения достигает середины дуги…Решение
1. Точка движется согласно уравнению s = πt2; следовательно, v =2st и из формулыКонтрольные вопросы и задания
1. Запишите в общем виде закон движения в естественной и координатной форме.
2. Что называют траекторией движения?
3. Как определяется скорость движения точки при естественном способе задания движения?
4. Запишите формулы для определения касательного, нормального и полного ускорений.
5. Что характеризует касательное ускорение и как оно направлено по отношению к вектору скорости?
6. Что характеризует и как направлено нормальное ускорение?
ЛЕКЦИЯ 10
Тема 1.8. Кинематика точки
Иметь представление о скоростях средней и истинной, об ускорении при прямолинейном и криволинейном движениях, о различных видах движения точки.
Знать формулы (без вывода) и графики равномерного и равнопеременного движений точки.
Уметь определять параметры движения точки по заданному закону движения, строить и читать кинематические графики.
Анализ видов и кинетических параметров движений
Равномерное движение
v — const. Для прямолинейного равномерного движения (рис. 10.1а)Равнопеременное движение
at = const. Для прямолинейного равнопеременного движенияНеравномерное движение
При неравномерном движении численные значения скорости и ускорения меняются.
Уравнение неравномерного движения в общем виде представляет собой уравнение третьей S = f(t3) и выше степени.
Кинематические графики

Кинематические графики — это графики изменения пути, скорости и ускорений в зависимости от времени.
Равномерное движение (рис. 10.3)
Равнопеременное движение (рис. 10.4)
Примеры решения задач
Пример 1. По заданному закону движения S =10 + 20t — 5t2 ([S] = м; [t] = с) определить вид движения, начальную скорость и касательное ускорение точки, время до остановки.
(Рекомендуется обойтись без расчетов, использовать метод сравнения заданного уравнения с уравнениями различных видов движений в общем виде.)
 Решение
Решение
1. Вид движения: равнопеременное
2. При сравнении уравнений очевидно, что
- начальный путь, пройденный до начала отсчета – 10 м;
- начальная скорость 20 м/с;
- постоянное касательное ускорение at/2 = 5 м/с ; at = — 10 м/с .
- ускорение отрицательное, следовательно, движение замедленное (равнозамедленное), ускорение направлено в сторону, противоположную направлению скорости движения.
3. Можно определить время, при котором скорость точки будет равна нулю:
v = S' = 20 - 2 • 5t; v = 20 – 10t = 0; t = 20/10 = 2 c.
Примечание. Если при равнопеременном движении скорость растет, значит, ускорение — положительная величина, график пути — вогнутая парабола. При торможении скорость падает, ускорение (замедление) — отрицательная величина, график пути — выпуклая парабола (рис. 10.4).
Пример 2. Точка движется по желобу из точки А в точку D (рис. 10.5).
 Как изменятся касательное и нормальное ускорения при прохождении точки через В и С?
Как изменятся касательное и нормальное ускорения при прохождении точки через В и С?
Скорость движения считать постоянной. Радиус участка АВ = 10 м, радиус участка ВС= 5 м.
Решение
Нормальное ускорение (ап = v2/r) при переходе через точку В увеличивается в 2 раза, оно меняет направление, т. к. центр дуги АВ не совпадает с… 2. На участке ВС: — касательное ускорение равно нулю: at = 0;Решение
Второй участок — равномерное движение: v = 8 м/с; a2 = 0. Третий участок — торможение до остановки (равнозамедленное движение).Решение
v = vо + at = 0. Определяем начальную скорость в м/с: vо = 36*1000/3600 = 10 м/с. Выразим ускорение (замедление) из уравнения скорости: a = - v0/tРешение
1. Точка движется прямолинейно по уравнению s = 20t – 5t2 следовательно, скорость точки u = ds/d/t = 20 — 10t и ускорение a = at = dv/dt = —10 м/с2.… 2. Составим зависимость числовых значений s и v для первых 4 с движенияРешение
Время, необходимое для перемещения точки из положения 0 (начала отсчета) в положение 1, определим из уравнения движения, подставив частные значения… Уравнение изменения скоростиРешение
Уравнение изменения скоростиРешение
Время, необходимое для перемещения предмета от поверхности земли до дна шахты,…Решение
Для определения траектории точки нужно из уравнений движения исключить параметр t — время. Выразим t через х из первого уравнения:Контрольные вопросы и задания
1. Запишите формулу ускорения при прямолинейном движении.
2. Запишите формулу ускорения (полного) при криволинейном движении.
3.  Тело скатывается по желобу (рис. 10.7). Какие параметры движения меняются при переходе через точку В и почему?
Тело скатывается по желобу (рис. 10.7). Какие параметры движения меняются при переходе через точку В и почему?
Ответы:
1. ап.
2. at.
3. v.
4. Параметры движения не меняются.

4. По заданному уравнению движения точки S = 25 + 1,5t + 6t2 определите вид движения и без расчетов, используя законы движения точки, ответьте, чему равны начальная скорость и ускорение.
5. По заданному уравнению движения точки S = 22t — 4t2 постройте графики скорости и касательного ускорения.
6. По графику скоростей точки определите путь, пройденный за время движения (рис. 10.8).
7. Точка движется по дуге. Охарактеризуй движение точки (рис. 10.9).
 |
8. Ответьте на вопросы тестового задания.
Темы 1.7, 1.8. Кинематика. Кинематика точки .
ЛЕКЦИЯ 11
Тема 1.9. Простейшие движения твердого тела
Иметь представление о поступательном движении, его особенностях и параметрах, о вращательном движении тела и его параметрах.
Знать формулы для определения параметров поступательного и вращательного движений тела.
Уметь определять кинематические параметры тела при поступательном и вращательном движениях, определять параметры любой точки тела.
Поступательное движение
При поступательном движении все точки тела движутся одинаково: скорости и ускорения в каждый момент одинаковы. Поэтому для описания движения тела… Поступательное движение может быть…Вращательное движение
При вращательном движении все точки тела описывают окружности вокруг общей неподвижной оси. Неподвижная ось, вокруг которой вращаются все точки тела, называется осью… При этом каждая точка движется по окружности, радиус которой равен расстоянию точки до оси вращения. Точки на оси…Частные случаи вращательного движения
ω = const. Уравнение (закон) равномерного вращения в данном случае имеет вид: φ = φ0 + ωt.Скорости и ускорения точек вращающегося тела
Тело вращается вокруг точки О. Определим параметры движения точки А, расположенной на расстоянии r а от оси вращения (рис. 11.6, 11.7). Путь точки A: SA = ωrАПримеры решения задач

Пример 1. По заданному графику угловой скорости (рис.11.8)определить вид вращательного движения.
Решение
ω = φ/; е = ω/. 2. Участок 2 — скорость постоянна — движение равномерное, ω = const.Решение
1. Анализируем выражение для скорости: скорость меняется и зависит от времени линейно. Следовательно, угловое ускорение — постоянно, е = ω' = 2π = const.
2. Движение равнопеременное (равноускоренное, т.к. ускорение положительно).
Пример 3. Тело вращалось равноускорено из состояния покоя и сделало 360 оборотов за 2 мин. Определить угловое ускорение.
Решение
360 оборотов = 720π рад, φ = 720π рад. 2. Закон равнопеременного вращательного…Решение
Определяем угловую скорость вращения тела:Решение
Касательное ускорение точки A atA = 0; нормальное ускорение точки А аnA = ω2rA апA = (12,56)2 • 0,3 = 47,3м/с2. 5. Полное ускорение точек на ободе колесаРешение
1. Представим траекторию движения точки, как показано на рис. 5. Весь путь, пройденный точкой, разбиваем на участки равноускоренного (по отрезку… 2. Рассмотрим движения точки по отрезку АВ:TABCD = tAB + tBC + tCD = 25 + 20 + 5 = 50 c

6. Определим значение полного ускорения точки через 5 с после начала равнозамедленного движения (см. положение К на рис. 5)

Полное ускорение

Пример 7.Тело начало вращаться из состояния покоя и через 15 с его угловая скорость достигла 30 рад/с. С этой угловой скоростью тело вращалось 10 с равномерно, а затем стало вращаться равнозамедленно в течение 5 с до полной остановки.
Определить:
1) число оборотов и среднюю угловую скорость тела за все время вращения;
2) окружную скорость точек тела, расположенных на расстоянии r = 0,5 м от оси вращения тела через 5 с после начала движения.
Решение
1. Разграничим вращательное движение данного тела на участки равноускоренного, равномерного и равнозамедленного движения. Определим параметры… 2. Равноускоренное вращение (участок 1):Решение
Для определения скорости и ускорения точки необходимо знать угловую скорость и угловое ускорение диска. Уравнение изменения угловой скорости диска:Решение
Здесь для решения следует воспользоваться известными соотношениями для линейной скорости и нормального ускорения точек вращающегося тела: Если второе уравнение разделить на первое, найдем угловую скорость вращения шкива:Решение
Стержень OA совершает вращательное (колебательное) движение. Максимальные углы отклонения стержня от вертикали соответствуют наибольшим…Решение
1. Переведем начальную и конечную частоты вращения тела в единицы угловой скорости: 2. За время t1 = 30 с тело, вращаясь равномерно с угловой скоростью ω0 = 20π рад/с, повернулось на уголКонтрольные вопросы и задания
1. Какими кинематическими параметрами характеризуется поступательное движение и почему?
2. Запишите уравнение равномерного поступательного движения твердого тела.
3. Запишите уравнение равнопеременного поступательного движения твердого тела.
4. Запишите уравнения равномерного и равнопеременного вращательного движений твердого тела.
5. Задано уравнение движения тела S = f(t). Как определяют скорость и ускорение?
6. Для заданного закона (уравнения) движения
φ = 6,28 + 12t + 3t2 выберите соответствующий кинематический график движения (рис. 11.11).

7. Для движения, закон которого задан в вопросе 6, определите угловое ускорение в момент t = 5 с.
Практическое занятие №4. Кинематика точки. Простейшие движения твердого тела
Знать формулы для определения параметров поступательного и вращательного движений и кинематические графики.
Уметь определять кинематические параметры тела при поступательном и вращательном движениях, определять параметры любой точки тела.
Расчетные формулы для определения параметров поступательного движения тела
Закон равнопеременного движения:Расчетные формулы для определения параметров вращательного движения
Точки тела движутся по окружностям вокруг неподвижной оси (оси вращения). Закон равномерного вращательного движения:Рекомендации для решения задач расчетно-графической работы
Задание 1.
- Определить вид движения на каждом участке по приведенному кинематическому графику.
- Записать законы движения шкива на каждом участке. Параметры движения в конце каждого участка являются начальными параметрами движения на каждом последующем.
- Определить полный угол поворота шкива за время вращения. Использовать формулу для перехода от угловой частоты вращения к угловой скорости.
- Определить полное число оборотов шкива, используя формулу

- Построить графики угловых перемещений и угловых ускорений.
- Определить нормальное и касательное ускорения точки на ободе шкива в указанные моменты времени.
Задание 2.
- Подставив заданные коэффициенты в общее уравнение движения, определить вид движения.
- Определить уравнения скорости и ускорения груза.
Расчетно-графическая работа №5. Определение параметров вращательного движения.
Задание 1. Частота вращения шкива диаметром d меняется согласно графику. Определить полное число оборотов шкива за время движения и среднюю угловую…Тема 1.9. Кинематика. Простейшие движения твердого тела
 |
ЛЕКЦИЯ 12
Тема 1.10. Сложное движение точки. Сложное движение твердого тела
Иметь представление о системах координат, об абсолютном, относительном и переносном движениях.
Знать разложение сложного движения на относительное и переносное, теорему сложения скоростей.
Знать разложение плоскопараллельного движения на поступательное и вращательное, способы определения мгновенного центра скоростей.
Основные определения
Простыми движениями считают · поступательное и · вращательное.Метод разложения сложного движения на поступательное и вращательное
Плоскопараллельное движение раскладывают на два движения: поступательное вместе с некоторым полюсом и вращательное относительно этого полюса. Разложение используют для определения скорости…Метод определения мгновенного центра скоростей
 Скорость любой точки тела можно определять с помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Скорость любой точки тела можно определять с помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Задача сводится к определению положения мгновенного центра вращений (скоростей) (рис. 12.4).
Мгновенным центром скоростей (МЦС) является точка на плоскости, абсолютная скорость которой в данный момент равна нулю.
Вокруг этой точки тело совершает поворот со скоростью ω. Скорость точки А в данный момент равна vA = ωOA,Примеры решения задач

Пример 1. Рассмотрим механизм, в котором стержень OA вращается вокруг точки О со скоростью ω. Вдоль стержня перемещается ползун М со скоростью vM (рис. 12.8). Определить абсолютную скорость точки М.
Решение
vr = vM 2. Переносное движение — вращение стержня; скорость ve = ωОМ.Решение
 Найдем положение МЦС. Скорости точек А и В направлены вдоль стены и вдоль пола. Восстанавливая перпендикуляры к векторам скоростей, находим МЦС.
Найдем положение МЦС. Скорости точек А и В направлены вдоль стены и вдоль пола. Восстанавливая перпендикуляры к векторам скоростей, находим МЦС.
По известной скорости vb определяем угловую скорость ш стержня:

Сложное движение точки
Решение Относительно берега лодка совершает сложное движение: относительно потока воды и одновременно с потоком воды.…Решение
Движение точки А вместе с кривошипом считаем сложным; оно получается в результате сложения: а) движения точки А вместе с кулисой в ее возвратно-поступательном движении… б) движения точки А вместе с кулисным камнем, движущимся возвратно-поступательно в прорези кулисы в направлении,…Решение
Относительно поверхности земли точки обода маховичка совершают сложное движение. За переносное движение принимаем движение автомобиля, за… Очевидно, чтоПлоскопараллельное движение тела
Пример 6. Зубчатое колесо зажато между двумя параллельными зубчатыми рейками (рис. 1.51, а). Нижняя рейка неподвижна, верхняя — движется со скоростью v = 4 м/с. Определить скорость точки В.
Решение
Колесо совершает плоскопараллельное движение. Как известно, плоскопараллельное движение можно представить как сумму двух движении:… Тогда скорость точки В можно рассматривать как геометрическую сумму скоростей…Решение
при t = 2 с v0 = 9 м/с. Цилиндр совершает плоскопараллельное движение. Мгновенный центр вращения находится в точке Р. ПоэтомуРешение
Движение центра колеса О примем за переносное ае = а0. Относительное движение является вращательным относительно выбранного полюса О. Найдем… Составим выражение скорости точки О в произвольный момент времени:Контрольные вопросы и задания
- Какое движение называют сложным?
- Какие движения твердого тела называют простыми?
- Какие системы координат выбирают при определении скоростей твердых тел при сложном движении?
- Какое движение считают переносным, а какое — относительным?
- Сформулируйте теорему сложения скоростей.
- Какое движение называют плоским?
- Какие способы применяют для определения скоростей точек тела при плоскопараллельном движении?
- Что такое мгновенный центр скоростей, как его определяют и для чего используют?
- Ответьте на вопросы тестового задания.
 |
Темы 1.10, 1.11. Кинематика. Сложное движение точки. Сложное движение твердого тела
ЛЕКЦИЯ 13
Тема 1.12. Основные понятия и аксиомы динамики. Понятие о трении
Иметь представление о массе тела и ускорении свободного падения, о связи между силовыми и кинематическими параметрами движения, о двух основных задачах динамики.
Знать аксиомы динамики и математическое выражение основного закона динамики.
Знать зависимости для определения силы трения.
Содержание и задачи динамики
Динамика — раздел теоретической механики, в котором устанавливается связь между движением тел и действующими на них силами.
В динамике решают два типа задач:
- определяют параметры движения по заданным силам;
- определяют силы, действующие на тело, по заданным кинематическим параметрам движения.
При поступательном движении все точки тела движутся одинаково, поэтому тело можно принять за материальную точку.
Если размеры тела малы по сравнению с траекторией, его тоже можно рассматривать как материальную точку, при этом точка совпадает с центром тяжести тела.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
Поэтому динамику делят на динамику точки и динамику материальной системы.
Аксиомы динамики
Первая аксиома (принцип инерции): Всякая изолированная материальная точка находится в состоянии покоя или… Это состояние называют состоянием инерции. Вывести точку из этого состояния, т. е. сообщить ей некоторое ускорение,…Каждая сила системы сил действует так, как она действовала бы одна.
 |
Ускорение, сообщаемое точке системой сил, равно геометрической сумме ускорений, сообщенных точке каждой силой в отдельности (рис. 13.2):
Понятие о трении. Виды трения
Трение — сопротивление, возникающее при движении одного шероховатого тела по поверхности другого. При скольжении тел возникает трение скольжения, при качении — трение качения. Природа сопротивлений движению в разных случаях различна.
Трение скольжения.
Законы трения скольжения: 1. Сила трения скольжения прямо пропорциональна силе нормального давления: … Fтр = Ff = fR,Трение качения
Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и в каждый момент колесо должно перекатываться через выступ грунта. Для… Условие качения колеса состоит в том, что движущийся момент должен быть не…Примеры решения задач
Пример 1. Свободная материальная точка, масса которой5 кг, движется согласно уравнению S = 0,48t2+0,2t. Определить величину движущей силы.
Решение
2. Действующая сила согласно основному закону динамики F = ma; F = 5 * 0,96 = 4,8 Н. Пример 2. Тело массой т = 2 кг движется по гладкой горизонтальной поверхности согласно уравнению S = 2t3 (S — в…Решение
a1 /a2 = m2/m1 = 5/2 = 2,5 a1 = 2,5 a2 Пример 4. На материальную точку действует система сил (рис. 13.5). Определить числовое значение ускорения, полученного…Решение
Й вариант.
1. Определяем суммарную силу, действующую на точку:
 |
2. Определяем ускорение, сообщенное точке:
a∑ = 28/7 = 4 м/с2
Й вариант.
Определяем ускорения от каждой из сил системы (рис. 13.5, б):
а1 = 10/7 = 1,43 м/с2, а2 = 15/7 = 2,14 м/с2; а3 = 20/7 = 2,86 м/с2.
2. Определяем суммарное ускорение:
 Пример 4. Материальная точка, сила тяжести которой G = 100 Н, движется по прямолинейной гладкой поверхности (рис. 1.58) с ускорением а = 1,5 м/с2. Определить силу Р, вызывающую движение, пренебрегая силами сопротивления.
Пример 4. Материальная точка, сила тяжести которой G = 100 Н, движется по прямолинейной гладкой поверхности (рис. 1.58) с ускорением а = 1,5 м/с2. Определить силу Р, вызывающую движение, пренебрегая силами сопротивления.
Решение
Задано движение материальной точки, требуется определить движущую силу (прямая задача динамики). На материальную точку действуют три силы: сила… Силы G и N уравновешены, следовательно, основное уравнение динамики в этом…Решение
В данном случае силы заданы, требуется определить кинематические характеристики движения: ускорение, скорость (обратная задача динамики). По… ОткудаРешение
На бадью действует сила тяжести Q и натяжение каната Т. Следовательно, ОткудаКонтрольные вопросы и задания
1. Что называют массой тела? Назовите единицу измерения массы в системе СИ.
2. Что является мерой инертности тела?
3. Запишите основной закон динамики в векторной и дифференциальной форме.
4. На материальную точку действует постоянная сила. Как движется точка?
5.  Какое ускорение получит точка, если на нее действует сила, равная удвоенной силе тяжести?
Какое ускорение получит точка, если на нее действует сила, равная удвоенной силе тяжести?
6. После столкновения двух материальных точек с массами m1 = 6 кг и m2 = 24 кг первая точка получила ускорение 1,6 м/с2. Чему равно ускорение, полученное второй точкой?
7. В чем заключается принцип независимости действия сил?
8. Перечислите законы трения скольжения.
9. Перечислите факторы, влияющие на величину коэффициента трения скольжения.
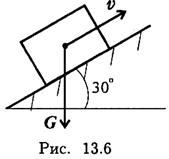
10. Тело движется по наклонной плоскости вверх (рис. 13.6). Масса тела 10 кг, коэффициент трения 0,2. Определите возникающую силу трения.
ЛЕКЦИЯ 14
Тема 1.13. Движение материальной точки. Метод кинетостатики
Иметь представление о свободных и несвободных материальных точках, о силах инерции, об использовании силы инерции для решения технических задач.
Знать формулы для расчета силы инерции при поступательном и вращательном движениях, знать принцип Даламбера и уметь определять параметры движения с использованием законов динамики и метода кинетостатики.
Свободная и несвободная точки
Материальная точка, движение которой в пространстве не ограничено какими-нибудь связями, называется свободной. Задачи решаются с помощью основного… Материальные точки, движение которых ограничено связями, называются… Для несвободных точек необходимо определять реакции связей. Эти точки движутся под действием активных сил и…Сила инерции
Инертность — способность сохранять свое состояние неизменным, это внутреннее свойство всех материальных тел. Сила инерции — сила, возникающая при разгоне или торможении тела… Рассчитано, что сила инерции равнаFин2 = m2 а
Разгоняющееся тело (платформа с массой т (рис. 14.1)) си лу инерции не воспринимает, иначе разгон платформы вообще был бы невозможен.
лу инерции не воспринимает, иначе разгон платформы вообще был бы невозможен.
При вращательном движении (криволинейном) возникающее ускорение принято представлять в виде двух составляющих: нормального ап и касательного at (рис. 14.2).
Поэтому при рассмотрении криволинейного движения могут возникнуть две составляющие силы инерции: нормальная и касательная


При равномерном движении по дуге всегда возникает нормальное ускорение, касательное ускорение равно нулю, поэтому действует только нормальная составляющая силы инерции, направленная по радиусу из центра дуги (рис. 14.3).

Принцип кинетостатики (принцип Даламбера)
Принцип кинетостатики используют для упрощения решения ряда технических задач. Реально силы инерции приложены к телам, связанным с разгоняющимся телом (к связям).
Даламбер предложил условно прикладывать силу инерции к активно разгоняющемуся телу. Тогда система сил, приложенных к материальной точке, становится уравновешенной, и можно при решении задач динамики использовать уравнения статики.
Принцип Даламбера:
Материальная точка под действием активных сил, реакций связей и условно приложенной силы инерции находится в равновесии:

Порядок решения задач с использованием принципа Даламбера
- Составить расчетную схему.
- Выбрать систему координат.
- Выяснить направление и величину ускорения.
- Условно приложить силу инерции.
- Составить систему уравнений равновесия.
- Определить неизвестные величины.
Примеры решений задач
 Пример 1. Рассмотрим движение платформы по шероховатой поверхности с ускорением (рис. 14.4).
Пример 1. Рассмотрим движение платформы по шероховатой поверхности с ускорением (рис. 14.4).
Решение
где Frb — движущая сила; Fтр – сила трения; G — сила тяжести; R — реакция… Пример 2. Тело весом3500 Н движется вверх по наклонной плоскости согласно уравнению S =0,16t2 (рис.14.5). Определить…Решение
Активные силы: движущая, сила трения, сила тяжести. Наносим реакцию в опоре перпендикулярно плоскости. Чтобы верно направить силу инерции,… При а > 0 движение равноускоренное. 2. Определяем ускорение движения:Решение
где Т — натяжение каната; G — сила тяжести; FИH — сила инерции, растягивающая… Для определения ускорения на участке 1 учтем, что движение на этом участке равнопеременное, скорость v = vo + at; v0 =…Решение
Активной силой, действующей на рамку, является сила тяжести груза Освободив^ рамку от связей, прикладываем к ней реакции опор VА и VВ (рис. 1.61,6).Решение
Добавочные динамические реакции VА и Vв опор балки возникнут от силы инерции груза Сила инерции направлена вниз, так как ускорение груза направлено вверх.Контрольные вопросы и задания
1. Объясните разницу между понятиями «инертность» и «сила инерции».
2.  К каким телам приложена сила инерции, как направлена и по какой формуле может быть рассчитана?
К каким телам приложена сила инерции, как направлена и по какой формуле может быть рассчитана?
3. В чем заключается принцип кинетостатики?
4. Задано уравнение движения материальной точки S = 8,6 t2. Определите ускорение точки в конце десятой секунды движения.
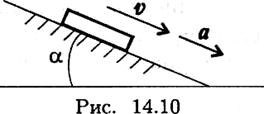
5. Тело движется вниз по наклонной плоскости (рис. 14.10). Нанесите силы, действующие на тело; используйте принцип Даламбера, запишите уравнение равновесия.
6.  Лифт спускается вниз с ускорением (рис. 14.11). Нанесите силы, действующие на кабину лифта, используя принцип кинетостатики, запишите уравнения равновесия.
Лифт спускается вниз с ускорением (рис. 14.11). Нанесите силы, действующие на кабину лифта, используя принцип кинетостатики, запишите уравнения равновесия.
7. Автомобиль въезжает на арочный мост с постоянной скоростью v (рис. 14.12). Нанесите силы, действующие на автомобиль в середине моста, используя принцип кинетостатики, запишите уравнения равновесия.
8. Ответьте на вопросы тестового задания.
Темы 1.12, 1.13. Динамика. Движение материальной точки. Метод кинетостатики.
 |
ЛЕКЦИЯ 15
Тема 1.14. Работа и мощность
Иметь представление о работе силы при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения силы трения, формулы для расчета работы и мощности при поступательном и вращательном движениях.
Уметь рассчитывать работу и мощность с учетом потерь на трение и сил инерции.
Работа
Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы».
Работа служит мерой действия силы, работа — скалярная величина.
Работа постоянной силы на прямолинейном пути
Единицы измерения работы: 1 Дж (джоуль)= 1 Н-м; 1 кДж (килоджоуль) = 103 Дж.Работа постоянной силы на криволинейном пути
Вектор силы можно разложить на две составляющие:Работа силы тяжести
Работа силы тяжести зависит только от изменения высоты и равна произведению модуля силы тяжести на вертикальное перемещение точки (рис. 15.6):

где Δh — изменение высоты. При опускании работа положительна, при подъеме отрицательна.
Работа равнодействующей силы
В случае движения под действием системы сил пользуются теоремой о работе равнодействующей. Работа равнодействующей на некотором перемещении равна алгебраической сумме…Примеры решения задач
Пример 1. Тело массой 200 кг поднимают по наклонной плоскости (рис. 15.8).
Определите работу при перемещении на 10 м с постоянной скоростью. Коэффициент трения тела о плоскость f = 0,15.
Решение
Подставляем входящие величины и определяем работу по подъему:Решение
2. Работа силы тяжести:Решение
где Fpeз — сила резания. 2. Угловая частота вращения 120 об/мин.Решение
Согласно закону Аммонтона — Кулона сила трения Сила трения направлена в сторону, противоположную движению, поэтому работа этой силы отрицательна:Решение
Вращающий момент, передаваемый валом, Выразим вращающий момент через усилия в ветвях ременной передачи:Контрольные вопросы и задания
1. Какие силы называют движущими?
2. Какие силы называют силами сопротивления?
3. Запишите формулы для определения работы при поступательном и вращательном движениях.
4. Какую силу называют окружной? Что такое вращающий момент?
5. Сформулируйте теорему о работе равнодействующей.
ЛЕКЦИЯ 16
Тема 1.14. Работа и мощность. Коэффициент полезного действия.
Иметь представление о мощности при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения мощности при поступательном и вращательном движениях, КПД.
Уметь рассчитать мощность с учетом потерь на трение и сил инерции.
Мощность
Мощность — работа, выполненная в единицу времени: Единицы измерения мощности: ватты, киловатты,Коэффициент полезного действия
Каждая машина и механизм, совершая работу, тратит часть энергии на преодоление вредных сопротивлений. Таким образом, машина (механизм) кроме… Отношение полезной работы к полной работе или полезной мощности ко всей…Примеры решения задач
 Пример 1. Определить потребную мощность мотора лебедки для подъема груза весом 3 кН на высоту 10 м за 2,5 с (рис. 16.3). КПД механизма лебедки 0,75.
Пример 1. Определить потребную мощность мотора лебедки для подъема груза весом 3 кН на высоту 10 м за 2,5 с (рис. 16.3). КПД механизма лебедки 0,75.
Решение
1. Мощность мотора используется на подъем груза с заданной скоростью и преодоление вредных сопротивлений механизма лебедки.
Полезная мощность определяется по формуле
Р = Fv cos α.
В данном случае α = 0; груз движется поступательно.
2. Скорость подъема груза

3. Необходимое усилие равно весу груза (равномерный подъем).
6. Полезная мощность Р = 3000 • 4 = 12 000 Вт.
7. Полная мощность. затрачиваемая мотором,

Пример 2. Судно движется со скоростью 56 км/ч (рис. 16.4). Двигатель развивает мощность 1200 кВт. Определить силу сопротивления воды движению судна. КПД машины 0,4.

Решение
2. По формуле для полезной мощности можно определить движущую силу судна с… Fдв = Fcопр.Решение
Пример 4. Для того чтобы поднять волоком по наклонной плоскости на высоту H =…Решение
Как известно, где Ап.с. — полезная работа; Адв — работа движущих сил.Контрольные вопросы и задания
1. Запишите формулы для расчета работы при поступательном и вращательном движениях.
2. Вагон массой 1000 кг перемещают по горизонтальному пути на 5 м, коэффициент трения 0,15. Определите работу силы тяжести.
3. Колодочным тормозом останавливают барабан после отключения двигателя (рис. 16.6). Определите работу торможения за 3 оборота, если сила прижатия колодок к барабану 1 кН, коэффициент трения 0,3.
4. Натяжение ветвей ременной передачи S1 = 700 Н, S2 = 300 Н (рис. 16.7). Определите вращающий момент передачи.
5. Запишите формулы для расчета мощности при поступательном и вращательном движениях.
6. Определите мощность, необходимую для подъема груза весом 0,5 кН на высоту 10 м за 1 мин.
7. Определите общий КПД механизма, если при мощности двигателя 12,5 кВт и общей силе сопротивления движению 2 кН скорость движения 5 м/с.
8. Ответьте на вопросы тестового задания.
 |
Тема 1.14. Динамика. Работа и мощность
 |
ЛЕКЦИЯ 17
Тема 1.15. Общие теоремы динамики
Иметь представление о понятиях «импульс силы», «количество движения», «кинетическая энергия»; о системе материальных точек, о внутренних и внешних силах системы.
Знать основные теоремы динамики, основные уравнения динамики при поступательном и вращательном движениях твердого тела, формулы для расчета моментов инерции некоторых однородных твердых тел.
Уметь определять параметры движения с помощью теорем динамики.
Теорема об изменении количества движения
Количеством движения материальной точки называется векторная величина, равная произведению массы точки на ее скорость mv. Вектор количества движения совпадает по направлению с вектором скорости.… Произведение постоянного вектора силы на некоторый промежуток времени, в течение которого действует эта сила,…Теорема об изменении кинетической энергии
Энергией называется способность тела совершать механическую работу.
Существуют две формы механической энергии:
· потенциальная энергия, или энергия положения, и
· кинетическая энергия, или энергия движения.
Потенциальная энергия (П) определяет способность тела совершать работу при опускании с некоторой высоты до уровня моря.
Потенциальная энергия численно равна работе силы тяжести.
П = Gh, где h — высота точки над уровнем моря.
Кинетическая энергия (К) определяется способностью движущегося тела совершать работу.
Кинетическая энергия — величина скалярная, положительная. Единицы измерения:Основы динамики системы материальных точек
Совокупность материальных точек, связанных между собой силами взаимодействия, называется механической системой.
Любое материальное тело в механике рассматривается как механическая система, образуемая совокупностью материальных точек. Из определения механической системы следует, что движение каждой из точек,… Силы, действующие на точки системы, делятся наДвижение центра масс определяет движение всей системы только при поступательном движении, при котором все точки тела движутся одинаково.
Основное уравнение динамики при поступательном движении тела
где т — суммарная масса тела; ас — ускорение центра масс тела. В поле земного притяжения центр масс совпадает с центром тяжести.Моменты инерции некоторых тел
Момент инерции полого тонкостенного цилиндра (рис. 17.5)Примеры решения задач
Пример 1. Автомобиль двигался со скоростью 54 км/ч. В результате резкого торможения автомобиль остановился. Определите время торможения, если коэффициент трения между поверхностью дороги и колесами автомобиля 0,36.
Решение
По теореме изменения количества движенияРешение
где M∑ — суммарный момент внешних сил; J — момент инерции; ε —… Определим угловое ускорение по формуле для угловой скорости при равнопеременном движении:Решение
2. Определяем суммарный момент внешних силРешение
Так как в число данных и искомых величин входят действующие силы (постоянные по величине и направлению), время движения, начальная и конечная… Силы, действующие на точку в произвольном положении, показаны на рис. 1.67 —… Вычисляем проекции на ось х импульсов сил, действующих на тело:Решение
В число данных и искомых величин входят действующие силы (постоянные по величине и направлению), время движения, перемещение точки, начальная и… Силы, действующие на точку в произвольном положении, показаны на рис. 1.69 (Р… Вычисляем работы сил, действующих на точку:Решение
Система состоит из грузов А, В, нити и блока. В число данных и искомых величин входят: действующие силы (постоянные пo величине и направлению),… Система в произвольном положении и действующие на нее силы показаны на рис.… Так как система вначале находилась в покое, то ее начальная кинетическая энергия Т0 равна нулю. Кинетическая энергия…Решение
Для решения задачи используем основное уравнение вращательного движения тела:Контрольные вопросы и задания
1. Тело массой 10 кг поднято на высоту 6 м. Определите потенциальную энергию тела и работу, которую совершит тело при падении с этой высоты.
2. Материальная точка массой 16 кг, движущаяся со скоростью 10 м/с, остановилась через 40 с. Определите величину тормозной силы.
3.  Тело массой 9,2 кг двигалось из состояния покоя 3 с с ускорением 4 м/с2 под действием силы F. Определите запас кинетической энергии, накопленный телом.
Тело массой 9,2 кг двигалось из состояния покоя 3 с с ускорением 4 м/с2 под действием силы F. Определите запас кинетической энергии, накопленный телом.
4. Сплошной однородный цилиндр вращается вокруг продольной оси (рис. 17.11). От каких параметров зависит момент инерции цилиндра?
Варианты ответов:
· Только от т.
· От m и d.
· От l, т и d.
· От l и т.
5. Определите вращающий момент на шкиве (рис. 17.12); d — 60 мм.
6. По результату решения предыдущей задачи (вопрос 5) определите момент инерции шкива, если, двигаясь из состояния покоя, он приобрел угловую скорость 50 рад/с за 10 с.
Примечание. При ответах на контрольные вопросы ускорение свободного падения можно принимать равным 10 м/с2.
Расчетно-графическая работа №6. Работа и мощность. Общие теоремы динамики
Знать зависимости для определения мощности при поступательном и вращательном движениях. КПД.
Знать основные уравнения динамики при поступательном и вращательном движениях твердого тела.
Уметь рассчитывать мощность с учетом потерь на трение и сил инерции.
Уметь определять параметры движения с помощью теорем динамики.
Расчетные формулы
где F — постоянная сила, Н; v — скорость движения, м/с; а — угол между… Мощность при вращенииРекомендации по выполнению задания.
- Используя принцип Даламбера, определить натяжение каната кабины лифта на каждом участке движения (Лекция 14, пример 3).
- Определить максимальное натяжение каната.
- По максимальному натяжению каната определить максимальную потребную мощность для подъема груза.
- По заданной величине КПД механизма определить максимальную мощность двигателя.
 Задание 2. Шкив массой т тормозится за счет прижатия колодок силами 2 кН (рис. П5.1). Определить время торможения шкива, если в момент наложения колодок частота вращения шкива равна 450 об/мин. При расчете шкив принять за сплошной диск. Движение считать равнозамедленным.
Задание 2. Шкив массой т тормозится за счет прижатия колодок силами 2 кН (рис. П5.1). Определить время торможения шкива, если в момент наложения колодок частота вращения шкива равна 450 об/мин. При расчете шкив принять за сплошной диск. Движение считать равнозамедленным.
 |
Рекомендации по выполнению задания.
1. По величине усилия прижатия колодок к диску и заданному коэффициенту трения определить момент трения колодок.
2. Определить момент инерции диска.
3. Используя основное уравнение динамики, определить угловое ускорение (замедление) при торможении.
4. Из уравнения скорости при равнопеременном движении опре-делить время торможения.
При защите работы ответить на вопросы тестового задания.
Темы 1.14 и 1.15. Динамика. Работа и мощность. Общие теоремы динамики

– Конец работы –
Используемые теги: Тема, Плоская, система, сходящихся, сил, определение, равнодействующей, геометрическим, способом, 130.115
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Тема 1.2. Плоская система сходящихся сил. Определение равнодействующей геометрическим способом 13
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.216 сек.
Новости и инфо для студентов