Диакоптические методы анализа - раздел Механика, МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ Диакоптические Методы (Методы Разбиения, Декомпозиции) Основаны На Раз...
Диакоптические методы (методы разбиения, декомпозиции) основаны на разделении сложной системы уравнений высокой размерности на более простые подсистемы с учетом связей между ними. В результате решение задачи высокой размерности сводится к последовательному (возможно, и параллельному) решению нескольких задач меньшей размерности. Каждая подсистема, в свою очередь, может разбиваться на более простые подсистемы.
Разбиению системы уравнений на подсистемы соответствует разбиение исследуемого объекта на части, что обычно осуществляет инженер-проектировщик, учитывающий при этом функциональную законченность частей и их повторяемость в структуре объекта. Возрастающая сложность анализируемых объектов ставит задачу автоматизации разбиения объекта на части с целью минимизации вычислительных затрат. Задачи можно решать методами эвристического дискретного программирования.
Отличительная особенность диакоптических методов анализа - возможность организации независимых вычислительных процессов отдельно для каждой подсистемы уравнений. Но для получения достоверных результатов нужно учитывать взаимовлияние подсистем. Поэтому в диакоптических методах периодически проводится согласование результатов вычислений в независимых подсистемах. Применительно к моделям макроуровня это согласование может производиться после (или в ходе) выполнения:
а) серии исключений неизвестных при решении ЛАУ методом Гаусса;
б) серии итераций при решении систем нелинейных АУ;
в) серии шагов интегрирования ОДУ.
Соответственно различают три группы диакоптических методов.
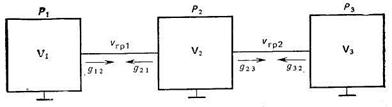
Методы раздельных вычислений для решения ЛАУ рассмотрим применительно к объекту, состоящему из трех частей Р1, Р2, Р3 (рис. 1), и в предположении, что для моделирования используется узловой метод.
Рис. 1. Пример проектируемого объекта, разделенного на три части.
Обозначим через V1, V2, V3 векторы потенциалов внутренних узлов соответствующих частей, через и потенциалы граничных узлов, связывающих части между собой (вектор Vгр), через V – вектор потенциалов всех внутренних и граничных узлов, т. е. V=(V1, V2, V3, Vгр).
Математическую модель объекта, показанного на рис. 1, можно представить в виде
(1)
где G1 = 0, G2 = 0, G3 = 0 - подсистемы уравнений для внутренних узлов частей Р1, Р2 и Р3 (каждое i-е уравнение для подсистем определяется как алгебраическая сумма переменных типа потока для всех ветвей, связанных с i-м внутренним узлом). Два последних уравнения - топологические уравнения, описывающие связь подсистем между собой, функции gгр1 и gгр2 образуют вектор-функцию Gгр. Общее число уравнений равно суммарному числу внутренних и граничных узлов.
Обозначим через G вектор-функцию для всех уравнений системы (1), которая примет вид
(2)
Применим для решения системы (2) неявный метод Эйлера, т. е. заменим , а для определения на каждом шаге интегрирования - метод Ньютона, который сводится к решению на каждой k-й итерации системы ЛАУ вида
(3)
где Я - матрица Якоби для системы (2); - значение на k-й итерации.
Вычисляя элементы матрицы Якоби отдельно для каждой подсистемы уравнений из (1), получим
(4)
В случае разбиения объекта на части матрица Якоби для системы (2) будет иметь блочно-диагональный вид с двойным окаймлением. Подобная структура матриц Якоби - типичная для диакоптических методов анализа.
Рассматривая каждую подматрицу как элемент, систему (3) можно эффективно решать методом Гаусса. Предположим, что имеется r подсистем одинаковой размерности q, связанных между собой в s граничных узлах, причем . Прямой ход Гаусса при решении системы ЛАУ с матрицей Якоби вида (4) состоит в преобразовании матрицы Якоби к верхнетреугольному виду, т. е. в обнулении подматриц Ягр1, Ягр2,…, Ягрr, что влечет за собой корректировку только подматрицы Ягр и вектора Gгр по формулам
(5)
для I = 1, 2, …, r.
Введем обозначения и , причем , а .
Из (5) следует, что вычисления и для каждой подсистемы можно организовать независимо от других подсистем либо последовательно, либо параллельно для многопроцессорных ВС.
При последовательной организации вычислений в ОП ЭВМ для выполнения прямого хода достаточно хранить подматрицы , , ,и векторы Gi, и Gгр. Остальные подматрицы и векторы можно хранить во внешней памяти. Тогда требуемые минимальные затраты ОП на выполнение прямого хода составят
При параллельной организации вычислений на многопроцессорных вычислительных системах надо хранить асе подматрицы и векторы:
Обратный ход Гаусса начинается с решения системы ЛАУ относительно граничных узлов, т. е. , где и матрица и вектор, полученные после прямого хода Гаусса.
Последовательно рассчитываются внутренние переменные для каждой подсистемы:
(6)
при i = 1, 2, …
Введем обозначения и , причем , а . Из (6) и (5) следует, что векторы и подматрицы можно вычислить для каждой подсистемы независимо от других подсистем в процессе прямого хода. В итоге суммарные затраты ОП ЭВМ составят при выполнении прямого хода
(7)
(8)
Затраты машинного времени при решении систем ЛАУ рассмотренным методом соизмеримы с затратами при решении системы ЛАУ методами разреженных матриц, т. е. увеличиваются линейно с ростом общего числа уравнений.
Методы раздельных вычислений при решении нелинейных АУ основаны на различной степени нелинейности отдельных подсистем. В общем случае каждая подсистема сходится за различное число итераций Ньютона, поэтому организация раздельных итерационных процессов для подсистем обеспечивает снижение суммарных вычислительных затрат на решение системы типа (1).
Методы раздельного интегрирования ОДУ основаны на различной инерционности отдельных, подсистем, когда в одной части объекта переходные процессы протекают быстро, а в другой - медленно. Эти методы особенно эффективны в тех случаях, когда переменные одной или нескольких подсистем уравнений оказываются в квазистатическом состоянии. Такие подсистемы называются латентными, а вычисления по уравнениям латентных подсистем не производятся на всем интервале квазистатичности, т. е. пока внутренние переменные остаются постоянными (в пределах заданной погрешности).
Таким образом, диакоптические методы анализа обеспечивают ускоренное решение систем ОДУ большой размерности благодаря учету блочной разреженности матриц Якоби таких систем и возможности организации автономных вычислительных процессов для подсистем. Это позволяет проводить анализ сложных объектов при ограниченном объеме ОП ЭВМ, а также выполнять параллельные вычисления в многопроцессорных ВС.
На сайте allrefs.net читайте: "МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ТЕХНИЧЕСКИХ ОБЪЕКТОВ"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Диакоптические методы анализа
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
ТЕХНИЧЕСКИХ ОБЪЕКТОВ
ВВЕДЕНИЕ. 2
1 КЛАССИФИКАЦИЯ И МЕТОДЫ ПОЛУЧЕНИЯ ММ.. 3
1.1 Классификация математических моделей. 3
1.2 Методы получения ММ... 6
1.3 Требования к м
Методы получения ММ
Основными методами получения ММ объектов на макроуровне являются:
· Обобщенный метод;
· Табличный метод;
· Узловой метод;
· Метод переменных состояний.
Методика получения математических моделей элементов
В общем случае процедура получения математических моделей элементов включает в себя следующие операции:
1. Выбор свойств объекта, которые подлежат отражению в модели. Этот выбор основан на
Постановка задачи
Математические модели на микроуровне, называемым распределенными, представлены дифференциальными уравнениями в частных производных вместе с краевыми условиями. Проектирование м
Краевые условия
Уравнения (1.2), (1.4), (1.6), (1.7) имеют множество решений. Для получения единственного решения необходимо задавать краевые условия (сведения об искомых непрерывных функциях на границах ра
Приближенные модели объектов на микроуровне
Точное решение краевых задач удается получить лишь для немногих частных случаев. Поэтому общий способ их решения, в том числе и в САПР, заключается в использовании различных приближенных моделей. В
Метод конечных разностей
В САПР решение дифференциальных или интегро-дифференциальных уравнений с частными производными выполняется численными методами. Эти методы основаны на дискретизации независимых переменных - их пред
Построение сетки в заданной области
В МКР пользуются, как правило, регулярные сетки, шаг которых либо постоянен, либо меняется по несложному закону. Ниже на рис. 1 приведен пример построения сеток в МКР.
Для одномерных облас
Метод конечных элементов
В настоящее время метод конечных элементов (МКЭ) является одним из наиболее популярных методов решения краевых задач в САПР. В математическом отношении метод относится к группе вариационно-разностн
Метод, основанный на вариационной постановке задачи
Метод, основанный на вариационной постановке задачи, требует минимизации некоторого специально подобранного функционала, который связан с физическим смыслом задачи. Подбор функционала являет
Метод Галеркина
Метод Галеркина - другой широко известный метод вычисления вектора узловых значений - представляет собой частный случай более общего метода взвешенных невязок. Основным преимуществ
Метод граничных элементов
При решении краевых задач приближенные модели технических объектов можно строить на основе интегральных уравнений. При этом первый шаг на пути к решению состоит в переходе от дифференциальных уравн
Дискретизация границы рассматриваемой области
Для приближенного решения (5) производится дискретизация границы рассматриваемой области. Аналогично МКЭ разбиение границы на элементы можно производить различными способами. В простейшем случае гр
ПОСТАНОВКА ЗАДАЧИ АНАЛИЗА ОБЪЕКТОВ С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
Использование ММ объекта в виде системы дифференциальных уравнений в частных производных можно только для очень простых технических систем, и даже в этом случае порядок аппроксимирующей алгебраичес
Аналогии компонентных уравнений
В большинстве технических систем можно выделить три типа простейших элементов:
A. Элемент типа R - элемент диссипации энергии. На этом элементе, как правило, происходит преобразован
Электрическая подсистема
Фазовыми переменными электрической подсистемы являются токи I и напряжения U. Запишем уравнения трех типов простейших элементов:
A. Уравнение сопротивления (закон Ома)
Механическая поступательная подсистема
Фазовые переменные механической поступательной подсистемы - силы F и скорости V - соответственно аналоги токов и напряжений. Запишем уравнения трех типов простейших элементов:
Гидравлическая (пневматическая) подсистема
Фазовые переменные гидравлической подсистемы – массовые расходы Qm и давления Р - соответственно аналоги токов и напряжений. Запишем уравнения трех типов простейших элемент
Тепловая подсистема
Фазовые переменные этой подсистемы - тепловые потоки Ф и температура Т - соответственно аналоги токов и напряжений. Запишем уравнения трех типов простейших элементов:
А. Из с
Электрическая подсистема
Связи между отдельными элементами этой подсистемы устанавливаются на основе законов Кирхгофа.
Уравнение первого закона Кирхгофа устанавливает равенство нулю суммы токов в узлах схемы, т. е
Механическая поступательная подсистема
Аналогом уравнения первого закона Кирхгофа является уравнение принципа Даламбера: сумма сил, действующих на тело, включая инерционные, равна нулю, т. е.
Механическая вращательная подсистема
Аналогом уравнения первого, закона Кирхгофа является уравнение принципа Даламбера для вращательных подсистем, т. е.
Тепловая подсистема
Аналогом уравнения первого закона Кирхгофа является уравнение равновесия в узлах подсистемы, т. е.
Эквивалентные схемы технических объектов
При получении ММ достаточно сложного технического объекта, состоящего из нескольких физических подсистем, нужно:
1) выделить в объекте однородные физические подсистемы, например механическ
Эквивалентные схемы механических поступательных подсистем
При построении эквивалентной схемы сначала в моделируемом объекте выделяют элементы, массу которых необходимо учесть. Такие элементы изображаются двухполюсниками (условное обозначение двухполюсника
Эквивалентные схемы электрических подсистем
Эквивалентные схемы таких подсистем практически совпадают с их принципиальными схемами, заменяются только сложные радиокомпоненты их схемами замещения, а также могут быть учтены «паразитные» элемен
Рекомендации к составлению эквивалентных схем
При составлении эквивалентных схем следует избегать последовательного соединения источника типа I и ветви типа L, а также параллельного соединения источника типа E и ветви типа
Типы связей между подсистемами различной физической природы
Ранее были рассмотрены эквивалентные схемы однородных физических подсистем. Но реальный объект представляет собой совокупность разнородных физических подсистем. Согласно основным этапам получения М
ЭЛЕМЕНТЫ ТЕОРИИ ГРАФОВ
Графы в математическом обеспечении САПР используются при решении задач синтеза, особенно в конструкторском проектировании, при проектировании программного обеспечения, баз данных, при решении задач
Обобщенный метод получения математических моделей систем
Математической моделью технического объекта на макроуровне является система обыкновенных дифференциальных уравнений, в общем случае не разрешенная относительно производных, т. е.
Табличный метод получения математических моделей систем
В табличном методе в вектор базисных координат включаются переменные величины типа U и I для всех ветвей схемы. Выбор такого базиса позволяет в эквивалентной схеме иметь любые зависимые ветв
Узловой метод получения математических моделей систем
Узловой метод является популярным при создании программных комплексов анализа динамических систем. В качестве вектора базисных координат в этом методе используется вектор переменных типа узловых по
Метод переменных состояния
Базис метода переменных, характеризующих состояние системы, или более коротко - метода переменных состояния, составляют переменные типа потока через элементы типа
Символический метод
Здесь большая часть действий по определению коэффициентов аi и bj производится в общем виде, т. е. выполняются операции над символическими обозначениями, в резул
МЕТОДЫ АНАЛИЗА ПОВЫШЕННОЙ ЭФФЕКТИВНОСТИ
Одновариантный анализ служит для оценки выходных параметров объектов при заданных внутренних и внешних параметрах. Он является необходимой составной частью более сложных задач много
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail

 и
и  потенциалы граничных узлов, связывающих части между собой (вектор Vгр), через V – вектор потенциалов всех внутренних и граничных узлов, т. е. V=(V1, V2, V3, Vгр).
потенциалы граничных узлов, связывающих части между собой (вектор Vгр), через V – вектор потенциалов всех внутренних и граничных узлов, т. е. V=(V1, V2, V3, Vгр).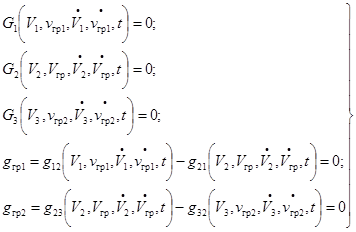 (1)
(1) (2)
(2) , а для определения
, а для определения  на каждом шаге интегрирования - метод Ньютона, который сводится к решению на каждой k-й итерации системы ЛАУ вида
на каждом шаге интегрирования - метод Ньютона, который сводится к решению на каждой k-й итерации системы ЛАУ вида (3)
(3) - значение
- значение  на k-й итерации.
на k-й итерации. (4)
(4)
 . Прямой ход Гаусса при решении системы ЛАУ с матрицей Якоби вида (4) состоит в преобразовании матрицы Якоби к верхнетреугольному виду, т. е. в обнулении подматриц Ягр1, Ягр2,…, Ягрr, что влечет за собой корректировку только подматрицы Ягр и вектора Gгр по формулам
. Прямой ход Гаусса при решении системы ЛАУ с матрицей Якоби вида (4) состоит в преобразовании матрицы Якоби к верхнетреугольному виду, т. е. в обнулении подматриц Ягр1, Ягр2,…, Ягрr, что влечет за собой корректировку только подматрицы Ягр и вектора Gгр по формулам (5)
(5) и
и  , причем
, причем 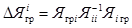 , а
, а 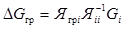 .
. и
и  для каждой подсистемы можно организовать независимо от других подсистем либо последовательно, либо параллельно для многопроцессорных ВС.
для каждой подсистемы можно организовать независимо от других подсистем либо последовательно, либо параллельно для многопроцессорных ВС. ,
,  ,
,  ,
, и векторы Gi, и Gгр. Остальные подматрицы и векторы можно хранить во внешней памяти. Тогда требуемые минимальные затраты ОП на выполнение прямого хода составят
и векторы Gi, и Gгр. Остальные подматрицы и векторы можно хранить во внешней памяти. Тогда требуемые минимальные затраты ОП на выполнение прямого хода составят

 , где
, где  и
и  матрица и вектор, полученные после прямого хода Гаусса.
матрица и вектор, полученные после прямого хода Гаусса. (6)
(6) и
и  , причем
, причем  , а
, а  . Из (6) и (5) следует, что векторы
. Из (6) и (5) следует, что векторы  (7)
(7) (8)
(8)





Новости и инфо для студентов