рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Трехмассовая упругая система.
Реферат Курсовая Конспект
Трехмассовая упругая система.
Трехмассовая упругая система. - раздел Менеджмент, КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления» ...

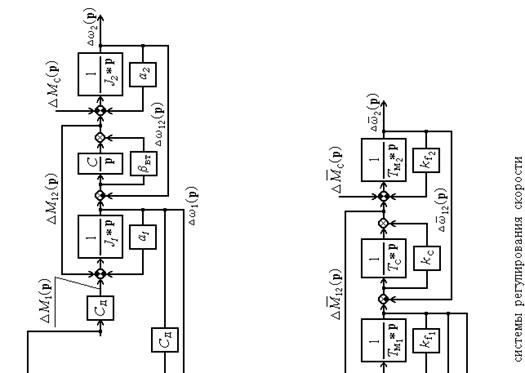
Рис. 1. Структурная схема трехмассовой упругой системы.
Трёхмассовая система позволяет достаточно подробно проследить как динамические так и статические особенности работы ЭП на достаточно высоком уровне, но сложности аналитического описания делают такую систему мало удобной, поэтому приведём систему к двухмасоовой.
 5. Приведение к двухмассовой системе.
5. Приведение к двухмассовой системе.
Рис.2. Эквивалентная расчетная схема двухмассовой упругой механической системы [2].
Момент инерции между первой и второй и между второй и третьей
массами соответственно:
 (5.1)
(5.1)
 (5.2)
(5.2)
Эквивалетный момент инерции первой и второй массы соотвктственно:
J1Э= J1+ J21 =0.432 (5.3)
J2Э= J2+ J23 =1.033 (5.4)
Жесткость механической связи:
 (5.5)
(5.5)
Соотношение масс:
 (5.6)
(5.6)
Резонансная частота системы:
 (5.7)
(5.7)
Логарифмический декремент принимаем на уровне 
Коэффициент сил вязкого трения, приведенный к двигателю:
 (5.8)
(5.8)
6.Математическая модель электромеханической системы подчинённого управления с упругой механической связью
На рис. 3 показана принципиальная схема исследуемой электромеханической системы, в которой приняты следующие обозначения: ТГ – тахогенератор ( – напряжение ТГ,
– напряжение ТГ,  – согласующее сопротивление для сигнала обратной связи по скорости); ЭД – электродвигатель (
– согласующее сопротивление для сигнала обратной связи по скорости); ЭД – электродвигатель ( – частота вращения ЭД,
– частота вращения ЭД,  – ток якоря ЭД); Р – редуктор; ТП – тиристорный преобразователь; ДТ – датчик тока (
– ток якоря ЭД); Р – редуктор; ТП – тиристорный преобразователь; ДТ – датчик тока (  ,
,  – аналогично ТГ); БТО – блок токоограничения;
– аналогично ТГ); БТО – блок токоограничения;  – напряжение задания; РС – регулятор скорости ( zрс – операторное сопротивление в цепи ОС регулятора скорости,
– напряжение задания; РС – регулятор скорости ( zрс – операторное сопротивление в цепи ОС регулятора скорости,  – согласующее сопротивление для входного напряжения,
– согласующее сопротивление для входного напряжения,  – напряжение на выходе РС); РТ – регулятор тока ( zрт,
– напряжение на выходе РС); РТ – регулятор тока ( zрт,  ,
,  – аналогично РС); СУ – система управления, формирующая управляющие сигналы для ТП;
– аналогично РС); СУ – система управления, формирующая управляющие сигналы для ТП;  – жесткость механической связи между ЭД и исполнительным механизмом.
– жесткость механической связи между ЭД и исполнительным механизмом.

Расчетная структурная схема в абсолютных единицах, соответствующая исследуемой ЭМС (рис. 3), и НСС для одномассовой системы показана на рис. 4. Аналогичные схемы для двухмассовой ЭМС, учитывающие упругость механической части электропривода, показаны на рис. 5. Приняты следующие обозначения:  ,
,  – соответственно, постоянные времени датчика тока и тахогенератора;
– соответственно, постоянные времени датчика тока и тахогенератора;  – постоянная времени тиристорного преобразователя;
– постоянная времени тиристорного преобразователя;  ,
,  ,
,  ,
,  – коэффициенты передачи и нормированные постоянные времени для регуляторов тока и скорости;
– коэффициенты передачи и нормированные постоянные времени для регуляторов тока и скорости;  , – передаточные функции регуляторов контуров скорости и тока;
, – передаточные функции регуляторов контуров скорости и тока;  , Tя – нормированное значение сопротивления и постоянная времени цепи якоря;
, Tя – нормированное значение сопротивления и постоянная времени цепи якоря;  , В*с – коэффициент, определяющий взаимосвязь между ЭДС двигателя и его частотой вращения при постоянном магнитном потоке, вычисляется по паспортным данным электродвигателя.
, В*с – коэффициент, определяющий взаимосвязь между ЭДС двигателя и его частотой вращения при постоянном магнитном потоке, вычисляется по паспортным данным электродвигателя.


– Конец работы –
Эта тема принадлежит разделу:
КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления»
ГОУВПО ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ... ФАКУЛТЕТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ... КАФЕДРА ЭЛЕКТРОПРИВОДА И АВТОМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Трехмассовая упругая система.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.023 сек.
Новости и инфо для студентов