рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Моделирование двухмассовой системы со стандартными настройками.
Реферат Курсовая Конспект
Моделирование двухмассовой системы со стандартными настройками.
Моделирование двухмассовой системы со стандартными настройками. - раздел Менеджмент, КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления» Соберем И Смоделируем Двухмассовую Систему В Пакете Программ Matlab 7.5.0 Sim...
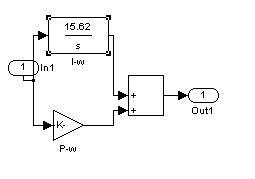
Соберем и смоделируем двухмассовую систему в пакете программ MatLab 7.5.0 Simulink [3] рис.15, подблоки ПИ-регуляторов показаны на рис.16. Используя расчет приведенный выше, и получим графики тока и скорости рис.17
При этом, учтём следущие коэффициенты:
 ;
;  ;
; 


а б
Рис.16 а-ПИ- регулятор контура тока, б-ПИ-регулятор контура скорости
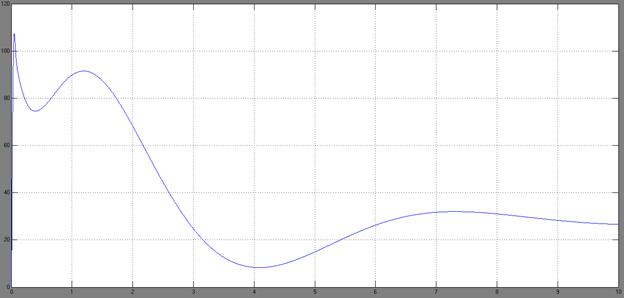
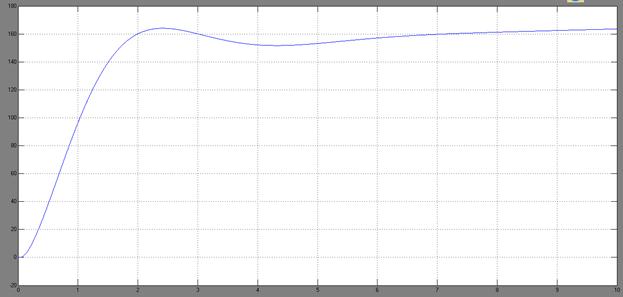
Рис.17 Переходные процесы тока и скорости в двухмассовой системе со стандартными настройками
Далее построим двухмассовую систему в нормированном виде. При этом учтём:







Рис.18 Переходные процессы в двухмассовой нормированной системе

9.2. Настройкаэлектромеханической системы с учётом упругости. Настройка двухмассовой системы без применения корректирующих устройств.
Проверяем возможность пренебрежения упругости при стандартных настройках для контура тока.
Условие определения соотношения параметров.
Условие №1 –
Условие №2:

 (9.1)
(9.1)
 (9.2)
(9.2)
 ;
;  (9.3)
(9.3)
где  - нормированное значение сопротивления цепи якоря;
- нормированное значение сопротивления цепи якоря;
 - электромеханическая постоянная времени;
- электромеханическая постоянная времени;
 - постоянная времени упругих колебаний.
- постоянная времени упругих колебаний.
Условие:
 (9.4)
(9.4)
для контура скорости не выполняется, т.к.  .
.
Кроме того, выполняются условия (7.5) и (7.6) для контура тока
 (9.5)
(9.5)
 -коэффициент собственного демпфирования системы.
-коэффициент собственного демпфирования системы.
 (9.5)
(9.5)
Следовательно, для контура тока нельзя пренебречь влиянием упругости при стандартных настройках, а значит, невозможно пренебрегать влиянием упругости и для контура скорости.
Иные настройки не подходят, т.к. 
Проверяем условия реализации настроек, используя таблицу 3:
Таблица 3. Настройка П- или ПИ-регуляторов без применения корректирующих устройств.
| Условия реализации настройки | Настройка ПИ-регулятора тока | Настройка П- или ПИ-регулятора скорости |
γ > 3÷3,5
 Выполняются условия пренебрежения влиянием упругости на контур тока
Выполняются условия пренебрежения влиянием упругости на контур тока
| 

| 

|

 Выполняются условия пренебрежения влиянием упругости на контур тока
Выполняются условия пренебрежения влиянием упругости на контур тока
| Та же |   ,
где, ,
где, 
|

| 
| 
|
|
| 
| 
|
Настройка №1:
γ > 3÷3,5 (9.6)
Данное условие выполняется, так как у нас  =3,14. Проверяем выполнение условия
=3,14. Проверяем выполнение условия
 (9.7)
(9.7)
 ; (9.8)
; (9.8)
 (9.9)
(9.9)
Кроме того, используем вывод о применении 1 настройки при и  , следовательно, для настройки регуляторов тока и скорости применяем следущие параметры:
, следовательно, для настройки регуляторов тока и скорости применяем следущие параметры:
 (9.10)
(9.10)
 (9.11)
(9.11)
 (9.12)
(9.12)
 (9.13)
(9.13)
Система для моделирования в среде Matlab аналогична рис.19, с учётом настроек контуров тока и скорости. Графики переходных процессов представлены на рис.20


Рис.20 Графики переходных процессов для случая настройки двухмассовой системы без применения корректирующих устройств.
При этом, как видно из графика скорости, время переходного процесса увеличивается в сравнении с системой со стандартными настройками без учёта упругости.
– Конец работы –
Эта тема принадлежит разделу:
КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления»
ГОУВПО ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ... ФАКУЛТЕТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ... КАФЕДРА ЭЛЕКТРОПРИВОДА И АВТОМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Моделирование двухмассовой системы со стандартными настройками.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.013 сек.
Новости и инфо для студентов